



2. 中国科学院自动化研究所, 北京 100190
2. Institute of Automation, Chinese Academy of Sciences, Beijing 100190, China
0 引言
近几年来,随着经济转型所带来高新技术产业的发展,机器人、人工智能等新兴领域日新月异,各类移动式机器人的应用需求日益迫切.
大多数移动式机器人系统底盘是多轮甚至履带式结构,静止时具有很强的静态稳定性,但是由于其转弯半径较大,故需要较大的工作空间,具有行动不够灵活、结构复杂、功耗较大等局限性.自行车机器人与普通多轮机械车相比,其结构简单、车体窄、质量轻、功耗小,能够适应各类复杂路况,在安防巡检、资源探查、物流行业以及娱乐展示和科普等方面,具有潜在的应用前景和市场价值.
自行车机器人作为具有典型对称性特征的非完整和欠驱动系统,两轮前后纵向布置且侧向倾角无直接驱动,受二阶动力学耦合约束.如何通过车把或者其它机械辅助结构实现整个系统的平衡非线性控制,是学术界公认的难题.
从设计结构上来讲,目前自行车机器人维持车体平衡的方法主要有使用机械辅助装置和无机械辅助装置两种,而根据驱动形式的不同主要有前轮驱动和后轮驱动两种.在有机械辅助装置思路方面,各国学者都进行了不同形式机械结构的系统设计与研究,其中以平动和转动机械调整两种方式的装置为主.国外最早由Yavin等学者[1]提出使用拉格朗日方程建立带有机械调节器的自行车机器人动力学模型,日本的Yamakita等研究了一种使用平衡质量调节器及辅助平衡装置和车把转动的协同配合,使自行车机器人具有在超低速下稳定控制和保持平衡的能力[2-3]. Kawaguchi等设计了一个可配置参数的辅助平衡器的自行车机器人实现了其系统的稳定控制[4-5].泰国的Anan通过尝试对飞轮的平衡反馈控制实现对自行车机器人的仿真[6].釜山国立大学的Yunki[7]等设计了一台通过反馈轮在车体内自转来辅助保持车体平衡的自行车机器人,并从受力分析入手构建了动力学模型,通过力矩等式和PID算法设计出了横滚角控制器、驱动电机控制器和车把控制器,并实现了实验样车在曲线路径下的稳定平衡和轨迹控制. Adam通过使用LQR和LQI控制优化了对内置惯性轮自行车机器人的控制精度,降低了能耗[8].
有机械辅助结构的自行车机器人虽然能在车体静止的状态下就具有较好的稳态性,但是其机械结构的驱动电机需要时刻处于加减速的动态响应中,将会消耗大量电能.同时车体结构将会变得繁复、沉重.使用了惯性动量轮自行车机器人可以简化为一个一阶的惯性轮倒立摆系统,控制难度将会大大降低.无机械辅助结构自行车机器人虽然有着更加复杂的动力学递推模型,但是其结构简单、车体轻盈、耗能更低,车把在车体行进过程中在维持车体平衡的同时控制着前进方向,更加符合机器人仿人学的研究范畴.
在无机械辅助装置自行车机器人的思路上,最早Getz[9]认为可以仅仅通过车把转动和后轮驱动实现车体的平衡控制,并据此推导了一种经过缩减了的自行车机器人动力学模型,研究了一种根据车体横滚角变化的控制策略. Sharma等学者[10]还利用了模糊逻辑等方法针对自行车机器人设计了模糊控制器,但是他们使用的仅是简单的力学分析和受力平衡的方法,没有对车体整体进行空间力学建模.日本的Taichi等学者[11]通过受力分析和建立状态方程,实现了仅仅通过仿人形机器人对车把的控制来实现对自行车车体的平衡控制.来自伊朗的Hashenmnia等基于李亚普诺夫规则针对自行车机器人设计了模糊控制器进行仿真[12].北京邮电大学的廖启征等研究人员最先尝试通过电位计、速率陀螺仪及单片机控制实现自行车机器人的短时间平衡控制,之后通过拉格朗日动力学方程及凯恩等方法的理论分析[13-14],使用了滑模控制算法,引入了模糊控制系统,并逐渐实现了短时间内直线前行,原地回转运动及在一定固定角度下的定车运动[15-19],他们设计的自行车机器人驱动形式为前轮驱动.考虑到后轮驱动的电机后置,使车体重量分布更均匀,且驱动效果同前轮驱动相差无异,本文自行车机器人将采用传统的后轮驱动.
本文针对一种无机械辅助装置后轮驱动的自行车机器人,通过拉格朗日法建立简易动力学模型,推导得出系统输入及输出量之间的复杂关系,并据此建立了传统PID控制器.为增强系统鲁棒性及优化控制效果,根据不同的控制状态制定相应的模糊规则,设计模糊自适应控制器[20],通过仿真对比实验及实验样机的实物实验验证了本文方案的有效性.本文所设计的自行车机器人尺寸更加小巧、运行起来更加灵活,样机结合模糊自适应控制算法具有更流畅、稳定的运行效果,其抗干扰能力强,在实际使用中作为展品具有现场展示的功能.
1 自行车机器人系统动力学模型设计了一款车体长度在500 mm以内,高度在400 mm以内的自行车机器人.控制平衡的电机安装在前车把,驱动电机安装在自行车车架中后部,通过皮带传动带动一前轮盘,对应当人骑自行车时脚蹬驱动的牙盘.电机动力通过皮带传动带动后轮轮盘及车轴,电源及控制电路装在车体车架上侧,车座及后车架的位置.为了辅助车体前期平衡调试,后轮两侧加装辅助轮防止在翻倒情况下摔坏车体.自行车机器人的相关物理参数如表 1所示,样机外形如图 1.
| 符号 | 物理参数 | 数值 |
| H | 车体总质心高度/m | 0.14 |
| β | 前车把车轴与竖直方向夹角/(°) | 20 |
| M | 整车质量/kg | 1.894 |
| R | 前后车轮半径/m | 0.09 |
| λ | 前后车轮接地点距离/m | 0.315 |
| λ1 | 后轮接地点到车体总质心距离/m | 0.135 |
| g | 重力加速度/(m/s2) | 9.8 |
| JC1 | 后轮及车架连体的转动惯性矩阵/(kg·m2) |  |
| JC2 | 前轮及前车把转轴连体的转动惯性矩阵/(kg·m2) |  |
| JF、JB | 前、后轮绕车轴旋转惯性系数/(kg·m2) | 0.001 9 |

|
| 图 1 无机械辅助结构后轮驱动自行车机器人样机 Fig.1 Rear-drive bicycle robot prototype without mechanical assisted structure |
图 2为自行车机器人的几何结构示意图,其中,以后车轮与地面的接触点为参考坐标系e的原点,以后车车轮中心为坐标系原点的坐标系为e(1),以转把中轴中心点为坐标系原点的坐标系为e(2).车体前后轮半径都为R,自行车后轮的车体侧向横滚角为α,自行车后轮前向转动的线速度为v,自行车前车把转把的航向角转角为ω.当自行车车体侧向倾斜进行曲线运动时,其前后两车轮车轴所在的直线为空间异面直线.为了便于对车体在直线转把调整或者曲线运动中的转弯半径进行分析,使用自行车机器人运行俯视图分析车体转弯姿态见图 3.

|
| 图 2 自行车机器人几何结构示意图 Fig.2 Geometry diagram of bicycle robot |

|
| 图 3 自行车机器人俯视图 Fig.3 Planform of bicycle robot |
为方便计算,将C点位置视为在前后轮接触点所在的直线上.
前后轮在自行车车体转弯行进时的转弯半径是:

|
(1) |

|
(2) |
C点所在的质心转弯半径为

|
(3) |
假设自行车前行过程中前后轮与地面都没有相对侧向滑动,而自行车整个车体结构都由后轮驱动,因此根据前轮的力学分解,前轮的转速v1与后轮转速v的关系为

|
(4) |
因此前轮转动的角速度q′0为
|
(5) |
后轮转速v与由电机驱动的角速度q′的关系为

|
(6) |
整体车架的航向角角速率是:
|
(7) |
整车的速度由两个部分组成,分别是在空间中左右横滚的横滚角速度vro和自行车车体质心在水平平面内的前进速度v0.

|
(8) |

|
(9) |
车体质心在运动中时绕虚拟O点所在竖轴的角速度矢量为

|
(10) |
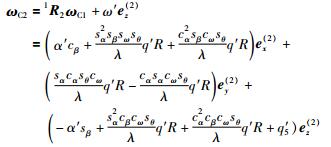
式中sα,sθ,cα,cθ分别代表sin α,sin θ,cos α和cos θ.同样,前车把的角速度矢量:
|
(11) |
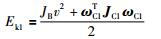
式中,1R2为坐标系e(2)到坐标系e(1)的坐标变换矩阵.车架和后轮组成的机械组合体转动的动能:
|
(12) |
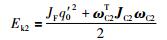
其中,JB为后轮在绕后车轴旋转时的转动惯量. JC1为后轮及车架连体的转动惯性矩阵.车把和前轮组成的机械组合体转动的动能:
|
(13) |
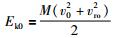
其中,JF为前轮在绕车轴旋转时的转动惯量,JC2为前轮及车把连体的转动惯性矩阵.若M为自行车机器人的总质量,因此系统的平动总动能:
|
(14) |
因此整个系统的总动能Ek为

|
(15) |
车把及前后车轮的在地面上转动时,车体的势能只会因侧倾所引起的重心的变化而产生变化.因此:
|
(16) |
根据拉格朗日运动学方程:

|
(17) |

|
(18) |
δi为系统选定的广义坐标.因此系统的力学模型为

|
(19) |
式中,
其中,mij(i,j=1,2,3)由α和ω的相关函数组成,nij(i,j=1,2,3)由α,α′,ω,ω′和q′组成.
系统约束形式为

|
(20) |
很显然,约束中含有坐标的1阶、2阶微分,存在对系统一定关节的点速度和加速度等限制,即含有不可积分的约束,因此本系统为2阶非完整约束系统.
由式(19)可知该自行车机器人系统是一个具有3独立自由度的欠驱动系统,且车架横滚角α为欠驱动自由度,车把转角ω为驱动自由度.若想实现对欠驱动自由度的间接控制,需推导出驱动与欠驱动自由度的等式关系,从而针对此系统设计出相对应的自行车机器人平衡控制器.
2 平衡控制器设计力学等式可以由式(19)改写为
|
(21) |
其中,

|
(22) |
其中,g为新引入的控制变量.本设计最初需要实现的平衡控制期望做到当自行车后轮以恒定速度驱动,车把航向角为0,车体直立、横滚角为0.因此系统期望值为αe=0,ωe=0,ve=v0,并设定系统中ei(i=1,2,…,6)为车把调整角度ω,车轮转速v,横滚角角度α及它们的变化率ω′,v′,α′的系统误差,将系统误差ei(i=1,2,3)作为输出值y,可得输入变量:

|
(23) |
式中,K1,K2为反馈系数矩阵.矩阵设定为
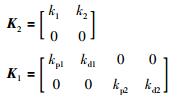
|
矩阵中的k1,k2,kp1,kp2,kd1和kd2为状态变量ε1=(e1 e4 e2 e5)T,ε4=(e3 e6)T的反馈系数.
同时,系统误差反馈方程:
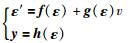
|
(24) |
因此,可推导得出:
|
(25) |
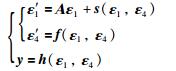
此时,
对相对应的雅可比矩阵进行特征值分析,得出如下系统维持平衡的必要条件:
|
(26) |
根据日常骑自行车时的经验,当感觉车体倾斜程度较大时需要较大的转速去转动车把,通过车把转弯使车体重心向侧向移动以及车体曲线运动时的向心力实现车体的平衡控制.电机扭矩输出同横滚角实际上呈一种复杂的非线性关系.为了提升控制效果,在车体倾斜角度较大、倾倒速度较快等极端情况下保持最优状态,加强系统鲁棒性,本文提出使用模糊自适应控制,按照模糊规则在线修正调节参数实现优化控制.考虑希望通过车把转动维持车体的平衡的同时,车把又能回正使车体沿直线行驶,且系统平衡控制优于其它控制,本系统对自行车机器人对象采用PID双闭环控制.外环的系统平衡控制环和内环对车把转动电机的速度环都使用PD控制.模糊自适应控制系统仿真框图如图 4所示.

|
| 图 4 模糊自适应控制器仿真框图 Fig.4 Simulation block diagram of fuzzy adaptive controller |
本系统中自适应模糊控制器以不断检测到的自行车姿态横滚角α误差e3和横滚角角速度α′的误差变化率e6作为输入,利用模糊推理输出双环PID控制器参数Δkp1,Δkd1,Δk1和Δk2,以此来对参数kp1,kd1,k1和k2进行实时调整.系统原平衡环和速度环的控制输出值为
|
(27) |
其中,参数整定的计算公式为
|
(28) |
根据以往对于欠驱动系统平衡控制的PID控制器参数的经验,可取以下参数作为仿真值:

|
于后轮转速为一恒定速度,所以可取kp2=1和kd2=0.将上述6个值代入式(26),验证可得符合维持平衡的必要条件.
由同时令输入和输出论域均取{-3,-2,-1,0,1,2,3},对模糊控制器的输入和输出进行模糊化处理,模糊子集为{负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)},采用三角形隶属度函数.同时要使经过调整后参数仍能符合式(26)的平衡条件.
由式(25)、式(26)可看出,车把电机的转速ω′及电机转速的积分值ω(转把角度)、也就是电机转矩与横滚角α呈非线性关系.根据对自行车机器人及人们平时骑自行车时的经验分析,可归纳出横滚角角度α和横滚角角速度α′跟平衡环PD控制器的参数kp1、kd1和速度环参数k1、k2之间的关系:
1) 当|α|较大时,为使自行车机器人能快速地恢复平衡状态及提高车体侧倾角度的范围,应选取较大的|k1|和较小的|k2|,|α|作为主要参考对象,|α′|也起一定作用.相对应的速度环为使车把电机仍能在较大的调整中回到中位,也应取较大的kp1,略微较小的kp2.
2) 当|α|中等时,|α|与|α′|起到相同的影响作用,为使自行车机器人转动车把时回复平衡状态时的超调较小,应选取较小的|k1|和一般的|k2|.速度环kp1也随之减小,kd1可以做适当的增加;
3) 当|α|较小时,以|α′|的变化为主要作用,整体看似车体趋于平稳,但是微调同样需要较大信号.要再次选取较大|k1|,并选取较大的|k2|.速度环kp1可取小,kd1适当取大,以避免在平衡状态左右出现过大的震荡.
基于以上定性关系制定模糊规则表,关于平衡环调整量Δk1、Δk2建立的模糊规则表如表 2、表 3所示,并通过重心法解模糊.公式如下:
| Δk1 | α′ | |||||||
| NB | NM | NS | ZO | PS | PM | PB | ||
| α | NB | PB | PB | PB | PM | PS | ZO | ZO |
| NM | PM | PM | PS | PS | ZO | ZO | ZO | |
| NS | PB | PB | PM | PS | ZO | NM | NB | |
| ZO | PS | PS | ZO | ZO | ZO | NS | NS | |
| PS | PB | PM | ZO | NS | NM | NB | NB | |
| PM | ZO | ZO | ZO | NS | NS | NM | NM | |
| PB | ZO | ZO | NS | NM | NB | NB | NB | |
| Δk2 | α′ | |||||||
| NB | NM | NS | ZO | PS | PM | PB | ||
| α | NB | PM | PM | PS | PS | ZO | ZO | ZO |
| NM | PB | PM | PM | PS | ZO | ZO | NS | |
| NS | PB | PB | PM | PS | ZO | NM | NB | |
| ZO | PS | PS | ZO | ZO | ZO | NS | NS | |
| PS | PB | PM | ZO | NS | NM | NB | NB | |
| PM | PS | ZO | ZO | NS | NM | NM | NB | |
| PB | ZO | ZO | ZO | NS | NS | NM | NM | |
|
(29) |
根据设计的模糊自适应控制器与系统流程框图,对文中所搭建的自行车机器人系统模型行仿真.仿真建立在后轮以恒定速度ve=v0驱动的情况下,使车体横滚角位于-0.1 rad的倾斜姿态,观察车体的平衡控制,仿真结果如图 5所示.

|
| 图 5 自行车机器人系统控制仿真结果图 Fig.5 Simulation results of bicycle robot system control |
由图 5及表 4对比可知,模糊PID控制器较传统PID控制器第一调整周期的时间快了0.467 s,且第一次响应时的反馈信号幅值较大.由于模糊自适应PID控制器根据输入量对参数进行实时相关调整,在第一调整周期中传统PID控制器对车体姿态的调整产生了更大的超调量,因此需要了额外半个调节周期才让车体稳定在平衡状态.由车把电机控制车把转角的相关数据可看出,两控制器在第一周期的调整时长相差无几,仅差0.098 s,但是模糊自适应控制器在第一周期输出的超调量明显更小,且在同样2个调整周期后,模糊自适应控制器使用了更少的时间就实现了车把转角趋于0的直线行驶控制.
| 仿真输出数据名称 | 第一调整周期时间/s | 最大超调量/rad | 调节周期/个 | 调节时间/s | 稳定性 |
| (调节至±0.01 rad~±0.05 rad以内视为稳定) | |||||
| 传统PID控制器车体横滚角 | 3.253 | 0.052 85 | 1.5 | 4.595 | 稳定 |
| 模糊自适应控制车体横滚角 | 2.786 | 0.039 74 | 1 | 2.789 | 稳定 |
| 传统PID控制器车把转角 | 2.333 | 0.291 8 | 2 | 5.581 | 稳定 |
| 模糊自适应控制车把转角 | 2.235 | 0.239 2 | 2 | 5.092 | 稳定 |
仿真结果表明,针对于自行车机器人这一特殊的复杂非线性系统,本文所设计控制策略可有效实现预期目标,其中模糊自适应控制器在同一扰动状态下的控制效果更佳、能更好地适应自行车机器人对平衡运动的需求.
4 样机实验自行车机器人样机(如图 1)系统主要分为带有编码器反馈的车把转向电机、后轮驱动电机、传动带、电源及主控板组成.主控板搭载电机驱动模块、蓝牙模块、MPU6050传感器和STM32单片机等以实现系统相应功能.
本系统需要实时采集自行车机器人左右横滚角的姿态角度和角速度,对传感器检测姿态的实时性和精度要求较高. MPU6050模块为6轴运动处理组件,它集成了3轴MEMS陀螺仪及3轴MEMS加速度计,搭载一个可扩展的数字运动处理器DMP,使用I2C接口可以直接读取姿态值并使用.同时对于所读取的姿态值,也可以采用1阶互补滤波及卡尔曼滤波等算法进行处理.
在搭载的6050传感器上,3轴加速度计可以输出一个加速度与重力所成的角度,初始状态是稳定的、不会产生零漂误差,但是易受例如车体在运行当中往复调节方向时的振动及其它加速度的影响,3轴陀螺仪对于姿态角的输出虽然更加平滑且不受干扰,但是通过对角速度的积分得出的姿态角,运行时间较长时会产生累积误差.卡尔曼滤波可以将两种传感器的优点相互融合,将两者数据处理后得出一个稳定的横滚角角度值.该计算过程对于STM32单片机来说不会占用较大内存及较长的运算时间从而影响到系统控制的瞬时性.
将角速度值、通过卡尔曼滤波处理后的横滚角角度值及前车把转向电机编码器的检测值输入到基于第2小节所设计的模糊自适应控制器所烧录的单片机中.程序中使用中断函数进行实时姿态信息的获取和处理,单片机输出PWM脉冲至电机驱动模块,从而实现对前车把电机的转把控制.
通过蓝牙模块,可将运行过程中的实时参数每5 ms发送一次至PC终端串口,经过处理之后如图 6所示.图像显示在后轮以恒定速度v0驱动、车体置于-0.1 rad倾角的情况下经过检测及卡尔曼滤波处理的车体横滚角及车把编码器输出值与时间的关系.

|
| 图 6 自行车机器人系统仿真结果图像 Fig.6 Simulation results of bicycle robot system control |
实验中,干扰在0.8 s后使车体到达-0.1 rad的倾角,随后依靠对车把的平衡控制在1个周期(1.6 s)后横滚角大幅度减小,并在3 s左右之后车体趋于稳定,车把在小幅度范围内调整并使车体横滚角在小范围抖动后趋于0°.
实验表明,本文针对于自行车机器人所设计的模糊自适应控制器控制效果较佳,机器人车体能在0.1 rad,即5.73°大角度的倾斜姿态下,在动态环境中快速、平稳地回归平衡.
5 结论本文通过对自行车机器人这一种特殊的欠驱动非完整系统进行结构建模和控制分析,设计了自行车机器人模糊自适应控制策略,并进行了仿真分析及实物实验验证.仿真结果表明:模糊自适应控制器可以根据输入的偏差和偏差变化率实时调节控制参数,更快更平稳地实现了自行车机器人的平衡控制,在不改变硬件基础上改善了控制效果;实验结果表明:模糊自适应控制器在实际控制环境中,结合卡尔曼滤波对检测数据的处理,可以取得一个对自行车机器人平衡控制不错的效果.促进了以自行车、独轮车为典型代表的非完整欠驱动系统平衡控制研究的深入,对未来自行车机器人进一步研究及市场化应用具有一定的借鉴意义.
| [1] | Yavin Y. The derivation of a kinematic model from the dynamic model of the motion of a riderless bicycle[J]. Computers and Mathematics with Applications, 2006, 51(6): 865–878. |
| [2] | Yamakita M, Utano A. Automatic control of bicycles with a balancer[C]//Proceedings of IEEE International Conference on Advanced Intelligent Mechatronics. Piscataway, NJ, USA: IEEE, 2005: 1240-1250. https://www.researchgate.net/publication/4170593_Automatic_control_of_bicycles_with_a_balancer |
| [3] | Keo L, Yamakita M. Control of an autonomous electric bicycle with both steering and balancer controls[J]. Advanced Robot, 2011, 25(1/2): 1–22. |
| [4] | Keo L, Yoshino K, Kawaguchi M, et al. Experimental results for stabilizing of a bicycle with a flywheel balancer[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway, NJ, USA: IEEE, 2011: 6150-6155. https://www.researchgate.net/publication/221077907_Experimental_results_for_stabilizing_of_a_bicycle_with_a_flywheel_balancer |
| [5] | Kawaguchi M, Yamakita M. Stabilizing of bike robot with variable configured balancer[C]//Proceedings of the SICE Annual Conference. Berlin, Germany: Springer, 2011: 1057-1062. https://www.researchgate.net/publication/261241656_Stabilizing_of_bike_robot_with_variable_configured_balancer |
| [6] | Suebsomran A. Dynamic compensation and control of a bicycle robot[C]//Proceedings of the 2014 International Electrical Engineering Congress. Piscataway, NJ, USA: IEEE, 2014: 1-4. https://www.researchgate.net/publication/286672145_Dynamic_compensation_and_control_of_a_bicycle_robot |
| [7] | Kim Y, Kim H, Lee J. Stable control of the bicycle robot on a curved path by using a reaction wheel[J]. Journal of Mechanical Science and Technology, 2015, 29(5): 2219–2226. DOI:10.1007/s12206-015-0442-1 |
| [8] | Owczarkowski A, Horla D. Robust LQR and LQI control with actuator failure of a 2dof unmanned bicycle robot stabilized by an inertial wheel[J]. International Journal of Applied Mathematics and Computer Science, 2016, 26(2): 325–334. DOI:10.1515/amcs-2016-0023 |
| [9] | Getz N H. Control of balance for a nonlinear nonholonomic nonminimum phase model of a bicycle[C]//Proceedings of American Control Conference. New York, NJ, USA: ACM, 1994: 148-151. https://www.researchgate.net/publication/3771079_Control_of_balance_for_a_nonlinear_nonholonomic_non-minimum_phase_model_of_a_bicycle |
| [10] | Sharma H D, Umashankar N. A fuzzy controller design for an autonomous bicycle system[C]//Proceedings of IEEE International Conference on Engineering of Intelligent Systems. Piscataway, NJ, USA: IEEE, 2006: 1-6. https://www.researchgate.net/publication/224649748_A_Fuzzy_Controller_Design_for_an_Autonomous_Bicycle_System |
| [11] | Saguchi T, Yoshida K, Takahashi M. Stable running control of autonomous bicycle robot[J]. Transactions of the Japan Society of Mechanical Engineers Series C, 2007, 73(1): 2013–2041. |
| [12] | Hasshemnia S, Panahi M S, Mahjoob M J. Unmanned bicycle balancing via Lyapunov rule-based fuzzy control[J]. Multibody System Dynamics, 2014, 31(2): 147–168. DOI:10.1007/s11044-013-9357-8 |
| [13] |
郭磊, 廖启征, 魏世民.
自行车机器人动力学建模与MIMO反馈线性化[J]. 北京邮电大学学报, 2007, 30(1): 80–84.
Guo L, Liao Q Z, Wei S M. Dynamic modeling of bicycle robot and nonlinear control based on feedback linearization of MIMO systems[J]. Journal of Beijing University of Posts and Telecommunications, 2007, 30(1): 80–84. DOI:10.3969/j.issn.1007-5321.2007.01.018 |
| [14] | Huang Y H, Liao Q Z, Wei S M, et al. Research on dynamics of a bicycle robot with front-wheel drive by using kane equations based on screw theory[C]//2010 International Conference on Artificial Intelligence and Computational Intelligence. Piscataway, NJ, USA: IEEE, 2010: 546-551. https://www.researchgate.net/publication/224202103_Research_on_Dynamics_of_a_Bicycle_Robot_with_Front-Wheel_Drive_by_Using_Kane_Equations_Based_on_Screw_Theory |
| [15] |
于秀丽, 魏世民, 郭磊.
自行车机器人系统的稳定滑模控制[J]. 控制与决策, 2011, 26(3): 464–468.
Yu X L, Wei S M, Guo L. Stable sliding mode control of bicycle robot system[J]. Control and Decision, 2011, 26(3): 464–468. |
| [16] | Liu D Q, Guo L, Wei S M, et al. Dynamic modeling based on routh equations and adaptive fuzzy controller design for the rectilinear motion of a front-wheel drive bicycle robot[C]//Proceeding of the IEEE International Conference on Information and Automation. Piscataway, NJ, USA: IEEE, 2014: 984-989. https://www.researchgate.net/publication/286716282_Dynamic_modeling_based_on_routh_equations_and_adaptive_fuzzy_controller_design_for_the_rectilinear_motion_of_a_front-wheel_drive_bicycle_robot |
| [17] | Huang Y H, Guo L, Wei S M. Simple realization of balanced motions under different speeds for a mechanical regulator-free bicycle robot[J]. Cambridge University Press Journals, 2015, 33(9): 1958–1972. |
| [18] |
黄用华, 廖启征, 魏世民.
无机械调节器的自行车机器人圆周运动实现[J]. 机械工程学报, 2013, 49(7): 141–147.
Huang Y H, Liao Q Z, Wei S M. Circular motion realization of a mechanical regulator free bicycle robot[J]. Chinese Journal of Mechanical Engineering, 2013, 49(7): 141–147. |
| [19] |
黄用华, 廖启征, 魏世民.
前轮驱动自行车机器人定车运动控制[J]. 北京邮电大学学报, 2012, 35(2): 5–9.
Huang Y H, Liao Q Z, Wei S M. Track-stand motion control of a front-wheel drive bicycle robot[J]. Journal of Beijing University of Posts and Telecommunications, 2012, 35(2): 5–9. DOI:10.3969/j.issn.1007-5321.2012.02.002 |
| [20] |
刘浩蓬, 龙长江, 万鹏, 等.
植保四轴飞行器的模糊PID控制[J]. 农业工程学报, 2015, 31(1): 71–77.
Liu H P, Long C J, Wan P, et al. Fuzzy self-adjusting PID control for eppo quadrocopter[J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(1): 71–77. DOI:10.3969/j.issn.1002-6819.2015.01.011 |