



2. 天津智能机器人技术重点实验室, 天津 300071
2. Key Lab of Intelligent Robotics Tianjin, Tianjin 300071, China
0 引言
近年来,伴随着我国经济、科技的快速发展,电机调速系统的应用范围不断地被扩大,因此对电机本体的设计及对电机控制系统的设计也提出了更高的要求.对于一般的永磁电机,永磁体位于其转子上,电机在高速旋转的过程中,转子上会产生较大的离心力,为了使电机能够可靠稳定运行,需要对转子加装一定的防护措施,这样不仅使得电机结构复杂且提高了成本,制约了电机性能的提升.针对转子永磁型电机的缺点,近年定子永磁型电机[1]成为研究的热点问题,其中磁通切换型永磁电机[2-4](flux-switching permanent magnet machine,FSPMM)是一种比较新的定子永磁型电机,该种电机将永磁体安置在定子侧,其转子结构简单,既无永磁体也无绕组,高速运行时转子的可靠性更高;它具有正弦度更高的电枢空载感应电势,因此具有良好的应用前景.
FSPMM的矢量控制调速系统需要速度传感器,而速度传感器会增加系统的体积和成本,并且传感器容易受到环境影响,一定程度上降低了系统的可靠性,因此研究电机的无传感器控制具有重要的实践意义.目前,国内外学者对这一领域进行了大量的研究,提出了多种无速度传感器控制方法.电机正常运行时转速辨识的方法主要分为2类:第1类方法是基于电机的凸极效应,利用高频信号注入法(High Frequency signal Injection,HFI)[5-6]可以实现对电机低速和零速的估计,但注入的高频噪声会影响电机的动态性能,并且当电机d-q轴电感差值为0时,高频信号注入法将失去转速跟踪的能力,因此这种方法具有一定的局限性.第2类方法是基于电机的反电动势,主要包括6种方法:
1) 磁链法;
2) 扩展卡尔曼滤波器法(extended Kalman filter,EKF);
3) 模型参考自适应法(model reference adaptive,MRA);
4) 人工智能的方法;
5) 滑模观测器法(sliding mode observer,SMO);
6) 扩张状态观测器法(extended state observation,ESO).
这些方法适用于高速运行中的电机.磁链法[7]是通过计算和对比反馈磁链与给定磁链,从中获得转子位置的脉冲信号,再通过测速算法得到电机转速.缺点是当电流脉动很大时,估算得到的磁链值与真实值误差较大,导致转速估计不准确. EKF方法将电机的转子位置和转速作为系统的状态变量进行实时的估计,可有效地削弱随机干扰和测量噪声.虽然采用该算法来估计电机的转速和转子位置具有较高的准确性,但该算法复杂、计算量大[8].其中MRA方法比较了假设位置和实际位置的电压电流信号,并通过调节使其信号偏差为零,得出估算的转子位置信息,缺陷是较依赖于电机模型和参数,因此在电机参数变化或者存在扰动时,会使得转速观测不准确[9].模糊控制、神经网络等[10-11]具有自适应、自学习等特性的人工智能算法近年来也被应用于电机的无传感器控制当中,根据离线训练的神经网络转子磁链观测器作为模型参考自适应系统的参考模型,从中提取出电机的转速信息,提升了速度的估计性能.方法5)和方法6)的基本原理均为通过输出误差校正来重构状态观测器,SMO是一种变结构非线性控制方法,算法简单且鲁棒性强,根据电机的电压电流方程设计滑模观测器,提取位置和转速信号,但容易引入“抖振”现象,可能会导致控制系统不稳定[12]. ESO以电流和反电动势作为状态量进行观测,大幅度地提升了观测的精度和系统的动态响应速度[13].
目前FSPMM的矢量控制系统中的外环转速调节器一般采用PI控制算法,但当系统受到外部扰动或者系统参数发生变化时,原有的PI调节器无法使系统获得满意的动态性能,因此一些先进控制算法逐渐被提出[14-15].韩京清教授于1998年正式提出了自抗扰控制(active disturbance rejection control,ADRC),它是一种不依赖于被控对象精确模型的控制思想和方法[16-18].线性自抗扰控制(linear active disturbance rejection control,LADRC)[19]是由高志强学者等提出,将ADRC的主要环节进行线性化处理. LADRC自身结构及参数整定都十分简单,再加上其易于性能分析等优点,因此它极大地促进了自抗扰控制理论的深入发展,并且在工程中具有广泛的应用[20-22].
为实现FSPMM的高性能控制,本文提出一种基于线性扩张状态观测器(LESO)的无速度传感器控制策略,采用LESO构造FSPMM的转速观测器,实现对转速准确而快速的实时估计和补偿;用线性自抗扰控制器(LADRC)作为系统外环的转速调节器,以提高系统的抗干扰能力.仿真结果表明,与基于SMO的无传感器PI控制策略相比,本文提出的控制策略在负载扰动和参数摄动时具有更强的鲁棒性.
1 数学模型三相12/10FSPMM的拓扑结构如图 1所示,定子部分的电枢线圈分为3组,其中A1~A4是A相的4个线圈.每个线圈的绕组横跨在2个定子齿上,中间嵌有永磁体,永磁体沿切向交替充磁.随着转子位置变化,FSPMM电枢绕组中会匝链交变的永磁磁链,进而产生感应电动势,实现“磁通切换”.

|
| 图 1 三相12/10极FSPMM结构图 Fig.1 Sectional view of three-phase 12/10 FSPMM |
定子电压方程和反电动势在αβ两相静止坐标系下可表示为
|
(1) |
|
(2) |
式中,iα、iβ、uα、uβ、eα、eβ、Lα、Lβ分别为定子电流、电压、反电动势和定子电感在αβ轴的分量;Rs为定子电阻;ωe、ωr分别为转子电角速度和机械角速度,ωe=Prωr,Pr为转子极对数;θe、θr分别为转子电角度和机械角度,θe=Prθr,ψm为永磁磁链.
电磁转矩在αβ坐标系下FSPMM可以表示为

|
(3) |
FSPMM的机械运动方程可以表示为
|
(4) |

|
(5) |
式中,Tem为电磁转矩,TL为负载转矩,J为传动系统的转动惯量,Bv为传动系统的摩擦系数.
2 基于线性扩张状态观测器的FSPMM的线性自抗扰控制12/10 FSPMM的转速环采用1阶LADRC调节器,控制方式采用id=0控制,转速观测器采用LESO,整体控制策略如图 2所示.

|
| 图 2 基于线性自抗扰的FSPMM无传感器控制结构图 Fig.2 Structure of FSPMM sensorless control system based on LADRC |
假设:
|
(6) |
式中,
可将系统(6)写成1阶状态空间方程的形式:
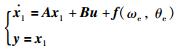
|
(7) |
其中,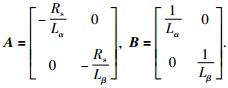
将f(ωe,θe)扩张为一个新的状态变量x2,即:
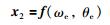
|
(8) |
令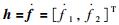
|
(9) |
假设
|
(10) |
经验证,式(10)是能观的,因此可构造2阶LESO:
|
(11) |
其中,β21、β22为转速和位置观测器增益.根据极点配置原理,令(s+ωo2)2=s2+β21s+β22,将观测器增益简化为对一个参数—观测器带宽ωo2的调节,即有β21=2ωo2,β22=ωo22.
在线性扩张状态观测器(11)中有:
|
(12) |
式中,β11、β12是观测器增益;


|
(13) |
根据上述分析,可构造出基于LESO的FSPMM转速观测器结构图,如图 3所示.

|
| 图 3 基于LESO的FSPMM转速和位置观测器 Fig.3 Structure of FSPMM LESO-based velocity and position observer |
LADRC具有结构简单,易于参数整定的优点.通过LESO对系统的总扰动进行估计并加以补偿,进而将系统线性化为串联积分器的形式.
转速调节器采用1阶LADRC,FSPMM的转速方程表示为

|
(14) |
其中,

将式(14)转化为标准形式:
|
(15) |
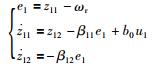
转速环采用2阶LESO:
|
(16) |
其中,β11、β12为转速环观测器带宽,根据极点配置原理,将观测器增益简化为对观测器带宽的调节,即有β11=2ωo1,β12=ωo12.
采用P控制器,kp为P控制器的放大系数,并对误差反馈控制量u0用扰动估计值z12的补偿来决定最终LADRC控制量u1:

|
(17) |
由于SMO算法具有很多的优良性能,如鲁棒性强、对参数变化不敏感等,因此它被广泛地应用于各个领域.为了与本文提出的LADRC+LESO算法进行对比分析,这里设计一种基于SMO的PI控制策略,利用SMO实现对FSPMM转子位置和速度的估算,系统的转速外环采用PI控制器对电机转速进行跟踪控制.
根据锁相环原理(phase-locked loop,PLL)构造基于SMO的FSPMM转速观测器,如图 4所示.其中,


|
| 图 4 基于SMO的FSPMM转速和位置观测器 Fig.4 Structure of FSPMM SMO-based velocity and position observer |

|
(18) |
其中,ωc为低通滤波器的截止频率.
由于开关特性的引入,导致通过SMO观测到的转子位置存在角度滞后,低通滤波器虽然一定程度上缓解了抖振问题,但却加剧了观测角度的滞后,因此需要对转子位置角进行补偿来缓解角度滞后.这里ωi为输入转速:
|
(19) |
以12/10FSPMM样机为例,对PI+SMO和LADRC+LESO两种无速度传感器控制算法的性能进行仿真验证,FSPMM的参数和控制器参数分别如表 1和表 2所示,其中,kP、kI为PI+SMO算法中PI控制器参数,Kp、Ki为PI+SMO算法中SMO中的PI控制器参数.
| 参数 | 数值 |
| 直流侧额定电压/V | 440 |
| 额定电流有效值/A | 3.8 |
| 直轴永磁磁链/Wb | 0.166 |
| 每相绕组电阻/Ω | 1.436 |
| 转动惯量/(kg·m2) | 8×10-4 |
| 额定转矩/(N·m) | 13 |
| 直轴电感/mH | 14.308 |
| 交轴电感/mH | 15.533 |
| 基速/(r/min) | 600 |
| 定子齿数 | 12 |
| 转子极数 | 10 |
| 相数 | 3 |
| 控制算法 | 参数 |
| LADRC+LESO | ωo1=0.01,ωo2=480,b=1 250,kp=1 020 |
| PI+SMO | kP=1.85,kI=0.05,Kp=1.25,Ki=1.2,K=1.2,l=25 |
研究分为4个部分,分别为LESO的观测能力分析、在转速突变和负载扰动时两种算法的抗扰动能力研究及通过蒙特卡洛实验对两种算法的鲁棒性分析.
4.1 LESO观测能力研究重点研究了当FSPMM基速时LESO的观测能力. 图 5给出了LESO的反电动势观测波形、转子位置波形及转子位置误差波形.

|
| 图 5 LESO观测能力仿真波形 Fig.5 Simulation results of LESO observation capability |
从图 5可以看出,经过参数整定后的LESO能够较为准确地估计出反电动势和转子位置.
4.2 转速突变时两种算法的抗扰动能力研究图 6给出了两种算法在转速突变情况下得到的转速响应、转速误差及转速外环控制器的输出量波形. FSPMM在转速600 r/min,负载2 N·m下启动,并且转速在0.01 s处由600 r/min突变为1 000 r/min.

|
| 图 6 LESO与SMO仿真波形 Fig.6 Simulation results for LESO versus SMO |
从图 6可以看出,采用PI+SMO算法得到的FSPMM速度响应与LADRC+LESO算法对比有一定的滞后现象.当系统运行在稳态时,采用LADRC+LESO算法得到的转速外环控制器的输出量Te的波形抖动现象不明显,响应较平滑,而采用PI+SMO算法得到的Te波形存在较明显的抖振现象,这是由于SMO中引入了开关特性所致.
4.3 负载突变时两种算法的抗扰动能力研究图 7和图 8对比了两种算法的抗负载扰动能力.转速设定为600 r/min,负载在0.05 s处由0 N·m突变到8 N·m,在0.08 s再回到0 N·m.此时PI控制器参数需要重新整定为kP=1.25,kI=6.5.

|
| 图 7 LADRC+LESO算法的抗负载扰动能力 Fig.7 Anti-load disturbance ability of LADRC+LESO |

|
| 图 8 PI+SMO算法的抗负载扰动能力 Fig.8 Anti-load disturbance ability of PI+SMO |
当FSPMM负载突变时,经过参数整定后的LADRC+LESO算法得到的转速响应相比PI+SMO算法会以更短的调节时间和更小的超调量达到稳态值.由图 7(b)和图 8(b)可以看出,FSPMM电磁转矩输出量的脉动比较大,但在合理的范围内,这是由于FSPMM自身的永磁气隙磁密度较高及它本身定转子的双凸极结构决定的,电磁转矩的脉动一定程度上会影响转速的平稳性.从图 7(a)和图 8(a)中的转速响应可以看出,电磁转矩的脉动虽然使得电机在稳态运行时,其转速会出现一定的波动现象,但依然能够使电机可靠稳定运行.
综上分析,当系统发生摄动时,无论是在转速突变或者负载突变情况下,经过参数整定后的LADRC+LESO算法的参数在系统发生摄动时,无需再次调节,说明算法的鲁棒性好;而经过参数整定后的PI+SMO算法在系统摄动时参数需要重新进行调节,说明LADRC+LESO控制算法的鲁棒性能和抗干扰性能优于PI+SMO算法.
4.4 蒙特卡洛实验为了验证PI+SMO和LADRC+LESO的性能鲁棒性,在保持控制器参数不变的情况下,使FSPMM的每相绕组电阻、d轴和q轴电感均发生±20%的随机摄动,进行500次蒙特卡洛实验.为了兼顾响应的快速性和准确性,引入ITAE性能评价指标,如式(20)所示:
|
(20) |
其中,e(t)是系统设定值与输出值之间的误差,T为仿真时间,T=0.1 s.
将调节时间ts、超调量σ和ITAE指标分别作为x、y、z轴,得到采用PI控制和LADRC控制的转速响应,分布分别如图 9所示,表 3给出了蒙特卡洛的实验结果.

|
| 图 9 基于两种控制算法的蒙特卡洛实验 Fig.9 Monte Carlo experiments based on the two control strategies |
| 转速调节器算法 | PI | LADRC |
| 调节时间ts/s | 0.2~0.7 | 0.08~0.48 |
| 超调量σ /% | 0.0215~0.03 | (2.5~8.3)×10-3 |
| ITAE | (1~3.5)×105 | (0.05~8.5)×104 |
ts、σ和ITAE值越小,表示系统的性能越好;蒙特卡洛实验结果越密,则系统的性能鲁棒性越强,因此,对于转速来说,LADRC+LESO算法在系统参数变化时的性能鲁棒性优于PI+SMO算法.
5 结论本文针对12/10的FSPMM进行了建模分析,设计了LADRC+LESO的无传感器控制策略,并与PI+SMO算法进行对比.仿真结果表明LESO能够较为准确地估计出转子位置和反电动势,所设计的LADRC+LESO控制策略在参数整定后能够快速而准确地对电机的转速进行实时估计,而且在转速突变或者负载扰动情况下,参数无需重新调整,抗干扰能力强;相比PI+SMO算法,本文提出的算法无需低通滤波器和角度补偿就可以实现转速和转子位置的准确跟踪;通过蒙特卡洛实验验证了所设计的LADRC+LESO策略比PI+SMO具有在更强的鲁棒性.为此种新型定子永磁型电机的无传感器控制后续的研究奠定了基础.
| [1] | Cheng M, Hua W, Zhang J, et al. Overview of stator-permanent magnet brushless machines[J]. IEEE Transactions on Industrial Electronics, 2011, 58(11): 5087–5101. DOI:10.1109/TIE.2011.2123853 |
| [2] | Zhao W X, Cheng M, Chau K T, et al. Control and operation of fault-tolerant flux-switching permanent-magnet motor drive with second harmonic current injection[J]. IET Electric Power Applications, 2012, 6(9): 707–715. DOI:10.1049/iet-epa.2011.0144 |
| [3] | Zhu Z Q, Chen J T. Advanced flux-switching permanent magnet brushless machines[J]. IEEE Transactions on Magnetics, 2010, 46(6): 1447–1453. DOI:10.1109/TMAG.2010.2044481 |
| [4] | Wang L, Aleksandrov S, Tang Y, et al. Fault-tolerant electric drive and space-phasor modulation of flux-switching permanent magnet machine for aerospace application[J]. IET Electric Power Applications, 2017, 11(8): 1416–1423. DOI:10.1049/iet-epa.2016.0864 |
| [5] |
王高林, 杨荣峰, 李刚, 等.
基于高频信号注入的IPMSM无位置传感器控制策略[J]. 电工技术学报, 2012, 27(11): 62–68.
Wang G L, Yang R F, Li G, et al. Position sensorless control strategy of IPMSM based on high frequency signal injection[J]. Transaction of China Electrotechnical Society, 2012, 27(11): 62–68. |
| [6] |
陈坤, 王辉, 吴轩, 等.
一种新型的内置式永磁同步电机无位置传感器低速控制策略[J]. 中国电机工程学报, 2017, 37(20): 6083–6091.
Chen K, Wang H, Wu X, et al. A novel position sensorless control for interior permanent magnet synchronous motor at low speed[J]. Proceedings of the CSEE, 2017, 37(20): 6083–6091. |
| [7] | Zhang Y, Liu C, Zhang L. Sensorless control of SRM based on improved simplified flux-linkage method[C]//17th International Conference on Electrical Machines and Systems. Piscataway, NJ, USA: IEEE, 2015: 722-726. https://www.researchgate.net/publication/282990757_Sensorless_control_of_SRM_based_on_improved_simplified_flux-linkage_method |
| [8] | Quang N K, Hieu N T, Ha Q P. FPGA-based sensorless PMSM speed control using reduced-order extended Kalman filters[J]. IEEE Transactions on Industrial Electronics, 2014, 61(12): 6574–6582. DOI:10.1109/TIE.2014.2320215 |
| [9] |
林茂, 李颖晖, 吴辰, 等.
基于滑模模型参考自适应系统观测器的永磁同步电机预测控制[J]. 电工技术学报, 2017, 32(6): 156–163.
Lin M, Li Y H, Wu C, et al. A model reference adaptive system based sliding mode observer for model predictive controlled permanent magnet synchronous motor drive[J]. Transaction of China Electrotechnical Society, 2017, 32(6): 156–163. |
| [10] | Gunabalan R, Subbiah V. Speed sensorless vector control of induction motor drive with PI and fuzzy controller[J]. International Journal of Power Electronics & Drive Systems, 2015, 5(3): 315–325. |
| [11] | Gadoue S M, Giaouris D, Finch J W. Sensorless control of induction motor drives at very low and zero speeds using neural network flux observers[J]. IEEE Transactions on Industrial Electronics, 2009, 56(8): 3029–3039. DOI:10.1109/TIE.2009.2024665 |
| [12] |
张润波, 林荣文, 高靖凯.
基于改进滑模观测器的PMSM无位置传感器的研究[J]. 电气技术, 2016, 17(1): 51–54.
Zhang R B, Lin R W, Gao J K. Research on sensorless control method of PMSM based on an improved sliding mode observer[J]. Electrical Engineering, 2016, 17(1): 51–54. |
| [13] | Xu Y T, Wang Z H, Zhao H L. Position sensorless control of PMSM based on extended state observer[C]//12th International Computer Conference on Wavelet Active Media Technology and Information Processing. Piscataway, NJ, USA: IEEE, 2016: 369-373. https://www.researchgate.net/publication/304189470_Position_sensorless_control_of_PMSM_based_on_Extended_State_Observer |
| [14] |
侯利民, 蔡柯, 李勇, 等.
无速度传感器PMSM混沌运动的非奇异快速终端滑模控制[J]. 信息与控制, 2016, 45(6): 666–670.
Hou L M, Cai K, Li Y, et al. Nonsingular fast terminal-sliding-mode control of chaotic motion in PMSM based on speed sensorless[J]. Information and Control, 2016, 45(6): 666–670. |
| [15] | Gu Y, Quan L, Xiang Z. Minimization the torque ripple of flux-switching permanent magnet motor based on iterative learning control[C]//17th International Conference on Electrical Machines and Systems. Piscataway, NJ, USA: IEEE, 2015: 1985-1989. https://www.researchgate.net/publication/283827796_Minimization_the_torque_ripple_of_flux-switching_permanent_magnet_motor_based_on_iterative_learning_control |
| [16] |
韩京清.
自抗扰控制器及其应用[J]. 控制与决策, 1998, 13(1): 19–23.
Han J Q. Active-disturbances-rejection controller and it's applications[J]. Control and Decision, 1998, 13(1): 19–23. DOI:10.3321/j.issn:1001-0920.1998.01.005 |
| [17] |
韩京清.
自抗扰控制技术——估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008: 255-262.
Han J Q. Active disturbance rejection control technique-The technique for estimating and compensating the uncertainties[M]. Beijing: National Defense Industry Press, 2008: 255-262. |
| [18] | Han J Q. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900–906. DOI:10.1109/TIE.2008.2011621 |
| [19] | Gao Z. Scaling and bandwidth-parameterization based controller tuning[C]//7th American Control Conference. Piscataway, NJ, USA: IEEE, 2003: 4989-4996. |
| [20] |
陈增强, 孙明玮, 杨瑞光.
线性自抗扰控制器的稳定性研究[J]. 自动化学报, 2013, 39(5): 574–580.
Chen Z Q, Sun M W, Yang R G. On the stability of linear active disturbance rejection control[J]. Acta Automatics Sinica, 2013, 39(5): 574–580. |
| [21] |
刘振业, 刘伟, 付明玉, 等.
基于模糊自适应ADRC的全垫升气垫船航向控制[J]. 信息与控制, 2011, 40(6): 747–752.
Liu Z Y, Liu W, Fu M Y, et al. Heading control of air cushion vehicles based on adaptive fuzzy ADRC[J]. Information and Control, 2011, 40(6): 747–752. |
| [22] |
陈增强, 程赟, 孙明玮, 等.
线性自抗扰控制理论及工程应用的若干进展[J]. 信息与控制, 2017, 46(3): 257–266.
Chen Z Q, Cheng Y, Sun M W, et al. Surveys on theory and engineering applications for linear active disturbance rejection control[J]. Information and Control, 2017, 46(3): 257–266. |
| [23] |
李冉, 赵光宙, 徐绍娟.
基于扩展滑模观测器的永磁同步电动机无传感器控制[J]. 电工技术学报, 2012, 27(3): 79–85.
Li R, Zhao G Z, Xu S J. Sensorless control of permanent magnet synchronous motor based on extended sliding mode observer[J]. Transaction of China Electrotechnical Society, 2012, 27(3): 79–85. |
| [24] | Deng H, Cao G Z, Huang S D, et al. A sensorless vector strategy for the PMSM using improved sliding mode observer and fuzzy PI speed controller[C]//6th International Conference on Power Electronics Systems and Applications. Piscataway, NJ, USA: IEEE, 2015: 1-6. |
| [25] |
胡伟, 耿亚珂.
改进滑模观测器的BLDCM无模型自适应控制[J]. 电子测量与仪器学报, 2016, 30(3): 456–464.
Hu W, Geng Y K. Model-free adaptive control of BLDCM based on improved sliding mode observer[J]. Journal of Electronic Measurement and Instrumentation, 2016, 30(3): 456–464. |