



2. 青岛海洋科学与技术试点国家实验室, 山东 青岛 266237;
3. 天津大学青岛海洋技术研究院, 山东 青岛 266237;
4. 山东科技大学机械电子工程学院, 山东 青岛 266590
2. Pilot National Laboratory for Marine Science and Technology(Qingdao), Qingdao 266237, China;
3. Qingdao Institute for Marine Technology of Tianjin University, Qingdao 266237, China;
4. School of Mechanical and Electronic Engineering, Shandong University of Science and Technology, Qingdao 266590, China
0 引言
海洋占地球总面积的71%,通过海洋监测可以认识海洋、利用海洋、保护海洋.自持式智能探测浮标又称“Argo”浮标,是近年来兴起的一种海洋监测平台,目的在于通过全球布放,准确并大范围地获取海洋温、盐、深剖面资料.自持式智能浮标是构成全天候海洋立体观测体系的一个重要组成部分,通过浮标的定深悬停功能,采集和观测大洋特定深度的物理海洋参数,为研究深海提供数据和资料,对于监测深海洋流,预防气候灾害,填补国内深海研究领域的空白具有重要意义[1-2].
国内外学者针对水下机器人的深度追踪及定深悬停提出了多种控制方法,如自适应控制[3-4]、滑模控制[5-9]、模糊控制[10-12]等. Isa等[13]忽略海洋参数的变化,对含有驱动装置的水下滑翔机进行运动建模,并采用线性控制器实现定深悬停.冯剑等[14]采用反馈线性化的PID控制器对移动机器人进行轨迹跟踪.孙庆刚等[15]通过无模型反馈控制方法调节自主式水下潜器(autonomous underwater vehicle,AUV)浮力调节单元,设定目标深度3 m和10 m,AUV最终稳定在3.2 m和10.4 m,深度误差在5%的范围内. Karasakal等[16]和田宇等[17]采用单闭环模糊PID控制器,通过模糊控制器的输出实时调节PID控制器参数以实现轨迹追踪.王志强等[18]针对多变量非方系统设计了一种具有多反馈回路分散结构的PI控制器,仿真结果证明多回路控制器具有良好的跟踪性能和抑制扰动的效果. Hammad等[19]通过对AUV进行逆运动学分析,利用双闭环自校正模糊PID控制器跟踪轨迹. Barker[20]将非线性模型线性化,设计联级控制器对浮标进行双闭环控制,目标深度设置为7 m,浮标最终稳定在±0.2 m范围内,深度误差2.85%.以上都是针对小潜深浮标在10 m范围内进行的定深控制,并未进行大潜深浮标定深控制的研究.本文在Hammad和Barker等人设计的小潜深控制器结构的基础上,针对浮标运动的非线性模型,采用模糊PID双闭环控制的形式,实现浮标大潜深定深悬停.为实现深海自持式智能浮标的定深悬停,本文从系统建模入手,建立了智能浮标的非线性运动模型,并考虑了海水密度变化对浮标运动产生的影响.根据建立的非线性模型,重点介绍了基于模糊PID双闭环定深控制系统的设计,并通过仿真验证了该控制系统的有效性和优越性.
1 浮标工作原理及模型建立 1.1 浮标工作原理智能浮标的工作流程如图 1所示.浮标经过中性配平后进行布防,外油囊和气囊均处于膨胀状态,浮标在海平面上悬停;经过卫星通讯,将各项数据传输完毕,浮标开始工作;外油囊和气囊通过浮力调节机制收缩体积,浮标开始下潜,在下潜过程中进行深度测量和数据存储,直至下潜到设定深度±1%的范围内开始悬停;经过悬停延时,通过浮力调节机构增大外油囊体积,浮标开始上浮,上浮过程中进行剖面测量和数据存储,当浮标运行深度小于5 m时,气囊膨胀;浮出海平面后,通过铱星发送数据;数据传输完毕后进行下一循环,直至电能耗尽.

|
| 图 1 浮标工作流程图 Fig.1 Work flow chart of the buoy |
浮力调节机构包括2个可形变的外油囊、油箱、油泵电机及1个可形变的气囊、气泵、电磁阀.
当浮标下潜时,电磁阀动作,气囊中的气体在外界压力作用下进入球壳,外油囊中的液压油流回油箱,浮标体积减小,开始下潜.当进行定深控制时,浮标所处潜深较大,依靠外界压力进行回油易造成浮标较大的震荡.因此本设计采用双向泵,通过油泵电机反转进行小油量调节.
当浮标上浮时,油泵电机开启,液压油在油泵电机的作用下,从油箱流入外油囊,浮标体积增大,开始上浮.通过调节油泵电机的转速和开启时间,控制流速和油量.在接近海平面5 m内,电磁阀动作,气泵开启,气体从球壳进入气囊,浮标继续上浮将天线抬出海平面,实现卫星通讯和数据发送.通过上文分析可知,系统通过排油、回油实现外油囊体积的变化,从而影响浮标所受净浮力,实现浮标的上浮下潜动作.
1.2 浮标下潜过程模型建立对智能浮标的运动过程进行分析时,设定:
1) 以垂直海平面垂直向下为正方向;
2) 只考虑浮标垂直方向的运动;
3) 忽略海流对浮标垂向运动的影响;
4) 浮标自身大小相对于浮标运动深度可以忽略不计.
浮标在下潜过程中,受到重力G、浮力Ff、阻力R三者的共同作用.简化的受力示意图如图 2所示.

|
| 图 2 浮标受力示意图 Fig.2 Force schematic diagram of the buoy |
浮标所受重力:

|
(1) |
其中,m是浮标的总质量,g是重力加速度.
浮标所受浮力,向上为负:

|
(2) |
其中,V是浮标的排水体积;V0是浮标初始体积;V(τ)是外油囊体积;ρ(h)是h米深度处的海水密度,主要由海水的温度、盐度和压力决定的,由于该浮标潜深较大,海水密度变化较大,若模型中采用密度的平均值进行计算,则对浮标定深控制误差较大.因此本文根据“Argo”浮标在太平洋海域(北纬7.5°,东经130.5°)CTD(conductance,temperature,depth)传感器测得的海水温、盐、深数据,通过线性插值法,利用Matlab进行曲线拟合,得到不同深度下海水密度曲线,如图 3所示.

|
| 图 3 海水拟合密度曲线 Fig.3 Fitting density curve of the seawater |
浮标所受摩擦阻力:

|
(3) |
其中,Cf为摩擦阻力系数,摩擦阻力系数仅与雷诺系数Re有关,其计算公式为
浮标所受粘滞阻力:

|
(4) |
其中,CD为粘滞阻力系数,与浮标的外形、海水粘度、浮标运行速度有关;A为浮标横截面积,即A=π×d2/4,d为浮标球壳直径,本设计采用直径为43 cm的玻璃球.
因此,浮标下潜过程中所受总阻力为

|
(5) |
阻力与浮标运动方向相反,下潜过程中,阻力向上为负.
浮标受到重力、浮力和摩擦阻力、粘滞阻力的共同作用,根据式(1)~式(5),可得到式(6):

|
(6) |
式中,∑F为浮标所受合力.根据牛顿第二定律建立浮标下潜过程的动力学方程组,将式(1)、式(2)、式(5)代入式(6),设系数k=(CD·A+Cf·Af)/2,得到式(7):

|
(7) |
其中,

|
(8) |
初始状态下,经过中性配平后,浮标处于悬停状态,重力mg等于初始浮力ρ(h)·g·V0.式(8)可以简化为

|
(9) |
本文各参数取值如表 1所示.
| 参数 | 描述 | 数值 |
| m | 浮标总质量 | 53.7 kg |
| g | 重力加速度 | 9.8 m/s2 |
| V0 | 浮标初始体积 | 0.051 3 m3 |
| d | 浮标球壳直径 | 43 cm |
| A | 浮标横截面积 | 0.145 1 m2 |
| Af | 浮标湿面积 | 2.322 3 m2 |
| CD | 粘滞阻力系数 | 1 |
| Cf | 摩擦阻力系数 | 0.037 3 |
| k | 阻力系数 | 0.115 885 |
将各参数值分别代入式(9),可得到浮标在下潜过程中的非线性动力学方程:
|
(10) |
根据物体运动学方程可知,浮标的下潜深度h可表示为运行速度u对时间t的积分,如式(11)所示:

|
(11) |
由上文可以看出,海水密度与浮标所处深度具有一定的耦合性,随着浮标下潜深度的增加,海水密度不断变化,海水密度的变化导致浮标所受净浮力改变,同时浮标所受阻力与速度二次方成正比,式中的积分项和二次项使该模型为具有强耦合性的非线性模型.在Matlab\Simulink的环境下,搭建该模型,如图 4所示.

|
| 图 4 非线性模型 Fig.4 Nonlinear model |
传统PID控制策略是根据已经建立好的系统传递函数来选择控制参数,针对本文中具有强耦合性的非线性系统,若采用线性PID控制策略,系统易产生较大的超调量和静态误差且达到稳定的时间较长.若采用非线性控制策略,则需要分段整定PID控制参数,参数众多,控制策略复杂[21].针对本文中的非线性模型,将模糊控制和传统PID控制结合起来,充分发挥模糊控制的鲁棒性,提高系统的容错性,克服控制系统中模型参数的变化和非线性,以减小系统的超调量和稳态误差,缩短到达稳定的时间.
2.1 模糊控制器的设计本文采用二维模糊控制器,以深度误差e1(t)及深度误差变化率c1(t)作为系统的输入,以设定速度作为模糊控制器的输出u1(t),其控制原理图如图 5所示.

|
| 图 5 模糊控制原理图 Fig.5 Fuzzy control principle figure |
由于浮标潜深较大,本设计只在接近目标深度20 m范围内加以控制,以节省电能,延长浮标使用寿命.控制器在接近目标深度20 m时开始工作,因此设模糊控制器深度偏差e1(t)的基本论域为[0, 20].设深度偏差变化率c1(t)的基本论域为[-0.12,0.06].设输出变量u1(t)的基本论域为[-0.55,0.55]. e1(t)的模糊子集A使用3个语言值{Z,PS,PB}分别代表{零,正小,正大},c1(t)的模糊子集B与u1(t)的模糊子集U使用{N,Z,P}分别代表{负,零,正}.根据论域覆盖程度、灵敏度和稳定度来确定隶属度函数[16],本文采用三角函数的隶属度函数.模糊控制器设置如表 2所示.
| 变量名称 | 模糊论域 | 模糊子集名称 | 模糊子集拐点参数 |
| Z (零) | [-10 0 10] | ||
| e1(t) | [0 20] | PS (正小) | [0 10 20] |
| PB (正大) | [10 20 30] | ||
| N (负) | [-0.21-0.12-0.03] | ||
| c1(t) | [-0.12 0.06] | Z (零) | [-0.12-0.03 0.06] |
| P (正) | [-0.03 0.06 0.15] | ||
| N (负) | [-1.1-0.550] | ||
| u1(t) | [-0.55 0.55] | Z (零) | [-0.55 0 0.55] |
| P (正) | [0 0.55 1.1] |
根据本文中2维控制结构及相应的输入模糊集合,求各推理关系R:

|
(12) |
对于输入的深度偏差精确值e1*和深度偏差变化率精确值c1*,经量化之后可表示成Ai和Bi的形式[22].对于∀(e1(t),c1(t),u1(t))∈A×B×U,推理关系R可表示成式(13)的形式:

|
(13) |
其中,i=1,2,3,j=1,2,3.根据推理关系Rij可形成模糊规则矩阵:当系统偏差较大时,以快速消除偏差为目的;当系统偏差较小时,以提高系统稳定性为目的[23].模糊规则矩阵如表 3所示.
输入量按照模糊推理算法决策出模糊输出量C(u),对于∀u∈U:

|
(14) |
决策得到的输出量是一个模糊集合,可以通过反模糊化得出一个精确量. Mamdani算法中,利用重心法进行解模糊,求得精确的输出响应u1,即该模糊控制器的输出为
|
(15) |
双闭环模糊PID控制系统共有2个反馈环路:控制器外环采用模糊控制,以深度为反馈量;控制器内环采用PID控制,以速度为反馈量.该控制系统的执行器为油泵电机,通过调节油泵电机的转数,实现油量的控制. PID算法公式[24]为
|
(16) |
式中,v(t)为浮标在t时刻的运动速度,kp为控制器比例系数,kD为控制器微分系数,kI为控制器积分系数.将式(15)代入式(16),可得到本文设计的双闭环模糊PID定深控制算法为
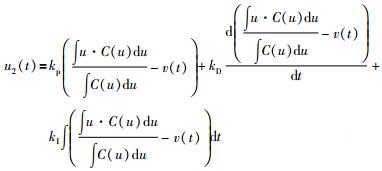
|
(17) |
模糊控制器的输出量与内环反馈量的偏差作为PID控制器的输入量.考虑比例单元P、积分单元I和微分单元D的参数对系统控制过程的影响趋势,设定PID参数,纠正系统响应,执行调节控制,本文取kP=64.0,kI=9.1,kD=1.2.双闭环模糊PID定深控制器的基本结构如图 6所示.

|
| 图 6 模糊PID定深控制器结构图 Fig.6 Structure diagram of the fuzzy PID depth controller |
在Matlab的环境下,根据上文建立的非线性模型,搭建Simulink模块,进行双闭环模糊PID定深控制器的设计[25],系统框图如图 7所示.

|
| 图 7 系统仿真框图 Fig.7 Simulation block diagram of the system |
控制器包含:模糊控制器模块;PID控制器模块;复位系统模块,其目的为防止误差累积对控制器产生影响,开启PID控制器的外部上升沿复位功能,当浮标运行深度误差小于20 m时,复位系统产生一个上升沿,在模糊控制器调控范围内将PID控制器复位;压力回油系统模块,依靠深海压力进行回油;选择系统模块,根据浮标所处深度选择回油路径,压力回油速度较快,不适用于定深调节,通过控制油泵电机转数,可精准控制回油量,实现浮标的定深悬停,选择系统模块包含一个比较模块,当浮标运行深度误差大于50 m时,采用压力回油,深度误差小于50 m时,采用油泵电机回油,压力回油速度与浮标所处深度有关,油泵电机回油速度与电机转速有关;系统模型模块,内含系统的非线性模型.
3 仿真结果 3.1 系统动态性能分析为验证双闭环模糊PID定深控制器的优越性,在MATLAB/Simulink环境下,基于所建立的非线性运动方程,分别对传统PID定深控制器与双闭环模糊PID定深控制器进行了仿真.利用经验试凑法整定传统PID定深控制器参数为:kP=0.226 7,kI=0.100 0,kD=0.100 0.仿真结果比较了传统PID定深控制器及双闭环模糊PID定深控制器对深度的跟踪曲线,目标深度设定为2 000 m. 图 8为传统PID控制器对深度的跟踪曲线,图 9为双闭环模糊PID控制器对深度的跟踪曲线.

|
| 图 8 传统PID定深控制曲线 Fig.8 Traditional PID depth control curve |

|
| 图 9 双闭环模糊PID定深控制曲线 Fig.9 Double closed-loop fuzzy PID depth control curve |
由图 8和图 9定深2 000 m的曲线可以看出,采用传统PID定深控制器与双闭环模糊PID定深控制器均可实现定深的基本要求.根据动态性能指标的定义,浮标从200 m运行到1 800 m的时间为上升时间,通过对以上波形进行分析,结合浮标的运动过程可知,基于传统的PID定深控制器与本文设计的双闭环模糊PID定深控制器在接近目标深度之前均使浮标以最大运行速度下潜,浮标从200 m运行到1 800 m的阶段中运动过程完全相同,因而上升时间相同tr=6 400 s.采用传统PID定深控制器时,最大潜深2 112 m,峰值时间tp=9 200 s,超调量σ%=5.6%,调节时间ts=12 424 s,最终在目标深度±30 m范围内震荡.采用双闭环模糊PID定深控制器时,最大潜深为2 040 m,峰值时间tp=8 755 s,超调量σ%=2.0%,调节时间ts=7 856 s,在超调后大约2 000 s的时间内迅速稳定在目标深度±1 m的范围中.通过对比可以看出,双闭环模糊PID定深控制器能够较快到达峰值且超调量较小,调节时间较短,系统稳态误差较小,控制效果较传统PID定深控制器更好.
图 10为双闭环模糊PID定深控制器对多目标深度的追踪曲线.初始时刻设定浮标在2 000 m悬停,15 000 s时设置浮标目标深度为4 000 m.由仿真结果可以得知,定深4 000 m的过程中深度均值为3 966 m,深度误差0.85%,误差在工程允许范围内.由仿真结果可知,基于双闭环的联级模糊PID定深控制器对多目标深度同样具有良好的跟踪效果,满足工程的需要.

|
| 图 10 双闭环模糊PID定深控制器多深度悬停曲线 Fig.10 Multi depth hovering curve of double closed-loop fuzzy PID depth controller |
为验证双闭环模糊PID定深控制器的稳定性,基于所建立的Simulink仿真模型,增加外界扰动,考虑海流干扰对浮标运动产生的影响.本文只考虑海流在垂直方向上的分力对浮标运动产生的影响.设定目标深度2 000 m,在20 000 s时加入20 N垂直向下的扰动,持续时间500 s,在35 000 s时加入40 N竖直向上的扰动,持续时间500 s.双闭环模糊PID定深控制器加入扰动之后对深度的跟踪曲线如图 11所示.

|
| 图 11 双闭环模糊PID定深控制器抗干扰曲线 Fig.11 Anti interference curve of double closed-loop fuzzy PID depth controller |
由图 11深度跟踪曲线可以看出,在加入垂直向上或向下的扰动后,通过双闭环模糊PID定深控制器的调节,经过一段时间后,浮标可以稳定在设定深度2 000 m范围内.加入20 N的扰动后,控制器的调节时间为ts1=3 678 s,加入-40 N的扰动后,控制器的调节时间为ts2=1 349 s.由仿真结果可知,双闭环模糊PID定深控制器针对外界存在的扰动,能够稳定在目标深度,具有良好的稳定性.
4 结论本文通过对浮标进行运动学分析,建立起浮标的运动方程.针对方程非线性和强耦合性的特点,设计了一种基于双闭环反馈回路的联级模糊PID定深控制器.
针对本文中强耦合性和非线性模型,采用传统PID定深控制器实现浮标的定深悬停功能存在一定的缺陷:其超调量和系统稳态误差较大,浮标最终在目标深度±30 m内震荡,油泵电机动作频繁,耗能较大,不利于浮标的稳定和长时间运行.双闭环模糊PID定深控制器通过模糊推理进行判断和决策,使用模糊变量来描述系统,克服了传统PID定深控制器的缺点,具有较小的超调量,仅为2.0%且浮标能迅速稳定在目标深度,深度误差在1.0%的范围内.在外加扰动的情况下,通过本文设计的双闭环模糊PID定深控制器的调节,经过一段时间后,浮标可以稳定在目标深度.双闭环模糊PID定深控制器对系统性能有明显的改善,可以实现深海自持式智能浮标高精度、高鲁棒性的定深悬停控制.
| [1] |
陈鹿, 潘彬彬, 曹正良, 等.
自动剖面浮标研究现状及展望[J]. 海洋技术学报, 2017, 36(2): 1–9.
Chen L, Pan B B, Cao Z L, et al. Research status and prospects of automatic profiling floats[J]. Journal of Ocean Technology, 2017, 36(2): 1–9. |
| [2] |
许建平, 刘增宏, 孙朝辉, 等.
全球Argo实时海洋观测网全面建成[J]. 海洋技术学报, 2008, 27(1): 68–70.
Xu J P, Liu Z H, Sun C H, et al. Entire achievement of global Argo real-time ocean observing network[J]. Ocean Technology, 2008, 27(1): 68–70. |
| [3] | Neila M B R, Tarak D, et al. Adaptive terminal sliding mode control for rigid robotic manipulators[J]. International Journal of Automation and Computing, 2011, 8(2): 215–220. DOI:10.1007/s11633-011-0576-2 |
| [4] | Chu Z, Xiang X, Zhu D, et al. Adaptive fuzzy sliding mode diving control for autonomous underwater vehicle with input constraint[J]. International Journal of Fuzzy Systems, 2017(8): 1–10. |
| [5] | Kim D, Choi H S, Kim J Y, et al. Trajectory generation and sliding-mode controller design of an underwater vehicle-manipulator system with redundancy[J]. International Journal of Precision Engineering & Manufacturing, 2015, 16(7): 1561–1570. |
| [6] | Jiang C, Wan L, Sun Y. Design of novel S-plane controller of autonomous underwater vehicle established on sliding mode control[J]. Journal of Harbin Institute of Technology, 2017, 24(2): 58–64. |
| [7] | Joe H, Kim M, Yu S C. Second-order sliding-mode controller for autonomous underwater vehicle in the presence of unknown disturbances[J]. Nonlinear Dynamics, 2014, 78(1): 183–196. DOI:10.1007/s11071-014-1431-0 |
| [8] | Lakhekar G V, Waghmare L M. Robust maneuvering of autonomous underwater vehicle:An adaptive fuzzy PI sliding mode control[J]. Intelligent Service Robotics, 2017, 10(3): 1–18. |
| [9] |
杨建华, 田守业.
基于滑模理论的水下机器人定深控制算法研究[J]. 计算机测量与控制, 2017, 25(8): 43–45.
Yang J H, Tian S Y. Research on depth control algorithm of underwater vehicle based on theory of sliding mode[J]. Computer Measurement & Control, 2017, 25(8): 43–45. |
| [10] | Hassanein O, Anavatti S G, Ray T. Fuzzy modeling and control for autonomous underwater vehicle[C]//International Conference on Automation, Robotics and Applications. Piscataway, NJ, USA: IEEE, 2012: 169-174. https://www.researchgate.net/publication/220774320_Fuzzy_modeling_and_control_for_Autonomous_Underwater_Vehicle |
| [11] | Khodayari M H, Balochian S. Modeling and control of autonomous underwater vehicle (AUV)in heading and depth attitude via self-adaptive fuzzy PID controller[J]. Journal of Marine Science & Technology, 2015, 20(3): 559–578. |
| [12] | Gona L J, Gom R S, Batlle C, et al. Fuzzy controller for the yaw and velocity control of the Guanay Ⅱ AUV[J]. IFAC-Papers, 2015, 48(2): 268–273. DOI:10.1016/j.ifacol.2015.06.044 |
| [13] | Isa K, Arshad M R. Modeling and motion control of a hybrid-driven underwater glider[J]. Indian Journal of Geo-Marine Sciences, 2013, 42(8): 971–979. |
| [14] |
冯剑, 张文安, 倪洪杰, 等.
轮式移动机器人轨迹跟踪的PID控制方法[J]. 信息与控制, 2017, 46(4): 385–393.
Feng J, Zhang W A, Ni H J, et al. Trajectory tracking control of wheeled mobile robots using PID control method[J]. Information and Control, 2017, 46(4): 385–393. |
| [15] |
孙庆刚, 郑荣, 安家玉, 等.
基于浮力调节系统的AUV定深悬浮控制[J]. 海洋技术学报, 2017, 36(6): 33–37.
Sun Q G, Zheng R, An J Y, et al. Study on the AUV depth and hovering control based on variable buoyancy system[J]. Journal of Ocean Technology, 2017, 36(6): 33–37. |
| [16] | Karasakal O, Guzelkaya M, Eksin I, et al. Online tuning of fuzzy PID controllers via rule weighing based on normalized acceleration[J]. Engineering Applications of Artificial Intelligence, 2013, 26(1): 184–197. DOI:10.1016/j.engappai.2012.06.005 |
| [17] |
田宇, 张艾群, 李伟.
基于混合模糊P+ID控制的欠驱动AUV路径跟踪控制及仿真[J]. 系统仿真学报, 2012, 24(5): 1016–1020, 1025.
Tian Y, Zhang A Q, Li W. Path-following control and simulation of underactuated autonomous underwater vehicles based on fuzzy P plus ID control[J]. Journal of System Simulation, 2012, 24(5): 1016–1020, 1025. |
| [18] |
王志强, 栾小丽, 刘飞.
多变量非方系统多环PI控制器设计[J]. 信息与控制, 2016, 45(5): 556–562.
Wang Z Q, Luan X L, Liu F. Multi-loop PI controller design for multivariable non-square system[J]. Information and Control, 2016, 45(5): 556–562. |
| [19] | Hammad M M, Elshenawy A K, Singaby M I E. Trajectory following and stabilization control of fully actuated AUV using inverse kinematics and self-tuning fuzzy PID[J]. Plos One, 2017, 12(7): e0179611. DOI:10.1371/journal.pone.0179611 |
| [20] | Barker L. Closed-loop buoyancy control for a coastal profiling float[R]. Santa Clara, CA, USA: Santa Clara University, 2014. |
| [21] |
张泾周, 杨伟静, 张安祥.
模糊自适应PID控制的研究及应用仿真[J]. 计算机仿真, 2009, 26(9): 132–135, 163.
Zhang J Z, Yang W J, Zhang A X. Research on fuzzy self-adaptive PID control and it's emulation[J]. Computer Simulation, 2009, 26(9): 132–135, 163. DOI:10.3969/j.issn.1006-9348.2009.09.037 |
| [22] |
刘金琨.
智能控制[M]. 第3版. 北京: 电子工业出版社, 2014: 51-106.
Liu J K. Intelligent control[M]. 3rd ed. Beijing: Electronic Industry Press, 2014: 51-106. |
| [23] |
杨航, 刘凌, 阎治安, 等.
双闭环Buck变换器系统模糊PID控制[J]. 西安交通大学学报, 2016, 50(4): 35–40.
Yang H, Liu L, Yan Z A, et al. A fuzzy PID control strategy for buck converter system of double closed loop circuits[J]. Journal of Xi'an Jiao Tong University, 2016, 50(4): 35–40. |
| [24] |
胡寿松.
自动控制原理[M]. 第6版. 北京: 科学出版社, 2013: 222-236.
Hu S S. The principle of automatic control[M]. 6th ed. Beijing: Science Press, 2013: 222-236. |
| [25] |
张德丰.
MATLAB模糊系统设计[M]. 北京: 国防工业出版社, 2009: 38-283.
Zhang D F. Design of MATLAB fuzzy system[M]. Beijing: National Defense Industry Press, 2009: 38-283. |