



2. 大连海事大学船舶电气工程学院, 辽宁 大连 116026
2. College of Marine Electrical Engineering, Dalian Maritime University, Dalian 116026, China
0 引言
切换系统包含一系列连续时间和离散时间的子系统及作用在其中的切换信号.许多实际系统可以被建模成切换系统,例如网络控制系统、航天控制系统、电力系统等[1-3].近年来,切换系统被广泛研究[4-5],提出了多李亚普诺夫函数、切换李亚普诺夫函数等关键技术.特别是平均驻留时间方法,是切换系统研究中灵活、有效的工具[6-7].
输出调节问题是控制理论研究领域的热点问题.其目的是在系统受到外部非期望干扰下,设计一个反馈控制器,在保持闭环系统稳定的同时,使输出渐近跟踪一类预先给定的轨道集.随着理论的不断完善和发展,内模原理、中心流形定理等技术解决了非切换系统输出调节问题[8].由于切换系统结构的复杂性,已有的研究非切换系统输出调节问题的理论和方法不再适用于切换系统,因此,切换系统输出调节问题的研究更加困难,其可解性等价于一组调节器方程组是否有解.文[9]利用共同李亚普诺夫函数的方法给出在任意切换信号下线性切换系统输出调节问题可解的充分条件,事实上,共同李亚普诺夫函数可能不存在或者很难找到.为了进一步降低保守性,文[10]引入了非共同坐标变换,突破了各子系统有共同解的限制,同时基于平均驻留时间方法给出线性切换系统输出调节问题可解的充分条件.当控制系统和外部系统的状态均未知时,文[11]设计了基于可测输出跟踪误差的切换规则和控制器求解线性离散切换系统的输出调节问题.文[12]构造一个合适的切换内模,解决了在非线性外部系统干扰下非线性切换系统的输出调节问题.增长无源性理论在处理系统稳定性方面是一个很有效的工具,文[13]通过引入增长无源的概念,构造控制系统和切换内模之间的反馈连接,解决了线性离散切换系统的输出调节问题.在此基础上,文[14]设计误差反馈控制器和基于误差的切换信号,利用增长无源性研究非线性切换系统的输出调节问题.
传统的时间触发控制系统中,系统以一个固定的时间间隔进行采样,有可能会产生不必要的采样,导致资源浪费.因此,为了克服传统时间触发控制的缺陷,一种可以根据系统目前性能需求进行采样的触发机制,即事件触发控制被提出.特别是在网络控制系统的研究中,当维持某种水平的控制性能时,事件触发可减少控制任务执行的次数以及降低控制器更新频率[15-16].近年来,切换系统事件触发控制成果不断涌现.文[17]提出基于状态的事件触发机制,利用平均驻留时间方法给出了线性切换系统的事件触发稳定性证明.文中假设相邻的事件触发时间间隔内无子系统切换或只能有一次子系统切换,使结果具有一定的保守性.文[18]首先给出了两次连续事件触发的最小间隔时间,排除了Zeno现象,进而通过讨论切换点和触发点之间的关系提出了基于输出的事件触发控制器来考虑线性切换系统的事件触发稳定性问题.在此基础上,文[19]利用多李亚普诺夫函数的方法研究基于状态反馈的线性切换系统事件触发稳定性问题.由于事件触发时刻与切换时刻的相互混合,文[20]考虑了两个连续触发时刻内有多次切换发生的情况,给出基于状态观测器的切换系统事件触发控制稳定性问题.由于切换系统中各子系统使用共同的事件触发机制过于局限性,文[21]给出了每个子系统都有自己的事件触发机制,使控制器设计更加灵活,同时利用多李亚普诺夫函数的方法研究了不确定线性切换时滞系统的事件触发鲁棒H∞控制问题.文[22]研究了在事件触发采样机制下基于观测器的混合时变时滞线性中立切换系统的稳定性问题,并考虑了异步切换的情况.目前,关于切换系统事件触发控制的研究成果主要集中在稳定性分析和H∞控制问题上.切换系统事件触发输出调节问题的研究同样具有重要的理论和实践意义.
本文首先通过考虑一个子系统活跃期间无事件触发和有多次事件触发两种情况,设计事件触发状态反馈控制器和基于可测状态信息的事件触发机制.给出事件触发机制,状态反馈控制器和满足平均驻留时间的切换信号联合设计的方案.构造非共同坐标变换,给出切换系统事件触发输出调节问题可解的充分条件.此外,为了避免Zeno现象,给出相邻事件触发间隔时间存在一个正下界.最后,将RLC电路模型建模为切换系统,通过Matlab仿真表明,设计基于可测状态的事件触发机制,可减少切换系统输出调节过程中的数据传输量.同时控制器更新频率降低仍可使系统的跟踪误差趋近于零.
1 问题描述考虑由如下状态空间模型描述的线性切换系统:

|
(1) |
其中,x∈Rn是系统的状态;u∈Rm是控制输入;σ:[0,∞)→ 
|
(2) |
初始条件w(0)存在于Rr的原点周围的某个开集W内.系统(2)可以看作是所有可能为外部输入的函数,被称为外部系统.和其它输出调节问题文献一样,本文假定外部系统(2)满足如下假设:
假设1[23] 系统(2)是非稳的,即矩阵S的所有特征值有非负实部.
用t0,t1,…,tj,…,j=0,1,2,…代表在时间段[t0,t)内的切换时刻.对应于σ(t),有切换序列{x(t0):(i0,t0),…,(ij,tj),…,| 
本文设计如下形式的状态反馈控制器,包括系统的状态和外部输入变量,即:

|
(3) |
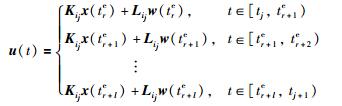
由于事件触发时刻与子系统切换时刻的相互混合,使控制器的设计十分复杂.因此,接下来本文通过讨论事件触发时刻与切换时刻之间的关系给出事件触发机制下状态反馈控制器的形式:
情况1 在子系统ij活跃期间无事件触发,即tre≤tj < tj+1 < tr+1e.此时事件触发状态反馈控制器为

|
情况2 在子系统ij活跃期间有l次事件触发,即tre < tj < tr+1e < … < tr+le≤tj+1.
此时事件触发状态反馈控制器为
|
这里Kij和Lij是待定的控制器增益.
综上,由以上两种情况可知,当t∈[tj,tj+1)时,可以得到系统(1)的统一的事件触发状态反馈控制器形式为

|
(4) |
这里h=0,1,…,l.在事件触发控制中,当事件触发时刻为tre时,控制器接收到采样信息x(tre)及w(tre),控制信号在零阶保持器下保持常值,直到在时刻tr+1e有新的事件发生,即控制输入只在事件触发时刻更新.
为了节约资源,在切换系统(1)中使用结合了切换信号的事件触发机制来决定事件是否发生.为此引入基于状态x(t),外部输入变量w(t)和切换信号σ(t)的事件触发条件:

|
(5) |
这里,






|
(6) |
当可测变量的集合包括状态x(t)的所有分量以及外部输入变量w(t)时,切换系统(1)和外部系统(2)在控制器(4)下构成如下闭环系统:
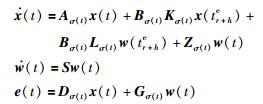
|
(7) |
此时对应的状态反馈事件触发输出调节问题定义如下:
定义1 对
1) 当外部输入w(t)=0时,闭环系统(7)指数稳定;
2) 对每个(x0,w0),闭环系统(7)在初始条件(x(0),w(0))=(x0,w0)下的解(x(t),w(t))满足:

|
定义2 考虑闭环系统(7),如果存在正常数c>0,α>0,对于任意初始情况x(0)∈Rn,w(0)∈Rr,在事件触发机制(6)下,闭环系统(7)的解满足:

|
成立,则闭环系统(7)是指数稳定,其中α为指数衰减率.
2 主要结果本节首先给出事件触发机制,状态反馈控制器和基于平均驻留时间的切换信号σ(t)的联合设计方案,讨论切换系统(1)的事件触发输出调节问题.其次给出相邻事件触发间隔时间存在一个正下界.
下面给出切换系统(1)在触发机制(6)和状态反馈(4)下的输出调节问题可解的充分条件.
定理1 考虑切换系统(1)和满足假设1的外部系统(2).
a) 对于给定的适维矩阵Tij-1,ij,若存在适维矩阵Πij满足:
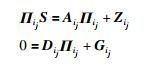
|
(8) |
以及非共同坐标变换:
|
(9) |
即:

|
(10) |
b) 对于给定的常数η>0,λ>0,μ0≥1,若存在适维矩阵Rij,Pij>0,满足下面的矩阵不等式组:
|
(11) |

|
(12) |
那么在满足平均驻留时间:
|
的任意切换信号下,事件触发状态反馈控制器(4)和事件触发机制(6)可解决切换系统(1)的输出调节问题,其中Lij=-KijΠij,控制器增益Kij=RijP-1ij,Ωij=AijPij+BijRij,
证明 引入坐标变换

|
(13) |
由此,切换系统(1)的事件触发输出调节问题可以被转化为闭环系统(13)的稳定性问题.为此取李亚普诺夫函数为

|
当t∈[tj,tj+1)时σ(t)=ij,V(t)沿着式(13)的导数满足:
|
(14) |
结合事件触发条件(5)和文[24]的引理2.2,可以得到
|
(15) |
对式(11)使用Schur补引理[25],可得

|
(16) |
对式(16)左右同乘


|
(17) |
通过式(17)得知,对任意的t∈[tj,tj+1),有:

|
(18) |
由于坐标变换是非共同的,故在切换点tj处,Vσ(tj)(tj+)≠Vσ(tj-1)(tj-).根据正定矩阵的性质,存在Pij-1/2>0,使得Pij-1=Pij-1/2Pij-1/2,应用式(10)和式(12)有:
|
(19) |
从而利用式(18)、式(19)和平均驻留时间定义[7]可知,对任意的t∈[tj,tj+1)有:
|
(20) |
令

|
(21) |
因此,
|
(22) |
于是,无扰动输入时,系统(13)在满足平均驻留时间的任意切换信号下是指数稳定的.同时,可以得到:

|
综上所述,系统(1)的事件触发输出调节问题是可解的.
相比于时间触发控制,事件触发控制在给切换系统带来好处的同时也引入了更复杂的动力特性.时间触发控制总可以保证两次连续触发间隔时间是正值从而避免Zeno现象,而事件触发控制不能做到这点.因此,接下来需要给出在设计的事件触发机制(6)下相邻事件触发间隔时间存在一个正下界,以此来避免Zeno现象.
定理2 考虑事件触发机制(6)下的线性切换系统(1).对任意给定的事件触发时刻tre和全部t∈[tr+1e,tr+2e),相邻事件触发间隔时间存在一个正下界T形式如下:

|
这里
证明 不失一般性,假设在[tj,tj+1)时间段内有l个触发时刻,用tr+1e,tr+2e,…,tr+le表示.事件触发区间为[tj,tr+1e),[tr+1e,tr+2e),…,[tr+le,tj+1),则:

|
再结合式(13)可知:

|
那么:
|
因此,当t∈[tr+1e,tr+2e),由上式求得 

|
这里


|
进而有:

|
因此,在一个事件触发之前,下面式子成立:

|
令T=t-tr+1e,则由上式可得任意相邻事件触发间隔时间的正下界为:

|
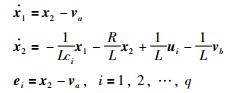
考虑一个如图 1所示的切换RLC电路[26],该电路中包含一个输入电源、一个电阻、一个电感和N个互相切换的电容,其动态方程如下:
|

|
| 图 1 切换RLC电路 Fig.1 Switching RLC circuit |
这里x=[Q I]T,输入ui为电压,ci表示第i个电容器的电容系数,va,vb是外部信号.存在矩阵Mi、Ni有va=Miw,vb=Niw. w=(w1,w2)T是外部输入变量,满足式(2).
考虑q=2时的RLC电路的切换模型如下:
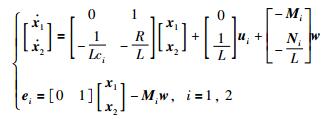
|
(23) |
故
选择的系统参数是L=0.1 H,R=0.2 Ω,c1=0.5 μF,c2=3.6 μF.从而


存在满足定理1中条件(8)的矩阵如下:

|
选取λ=2,η=0.8,μ0=1.48及矩阵:

|
μ1=1.822 9,μ=2.697 8.又由定理1可得
|
由


|
| 图 2 切换信号 Fig.2 Switching signal |

|
| 图 3 闭环系统的状态响应和事件触发采样状态响应 Fig.3 State responses and event-triggered sampling state responses of the closed-loop system |

|
| 图 4 闭环系统的输出误差 Fig.4 Output error of the closed-loop system |

|
| 图 5 控制输入 Fig.5 Control input |

|
| 图 6 事件触发间隔 Fig.6 Inter-event intervals |
在仿真中,选取步长h=0.05,在系统运行的15 s内,由图 6可知,事件触发次数为21次,仅仅是传统时间触发采样次数的1/15.该对比也表明设计基于事件触发的状态反馈控制器,在保证切换系统输出调节问题可解的前提下,还大大减少采样信息传输量和降低控制器更新频率.
4 结论本文讨论了在事件触发状态反馈控制器作用下线性切换系统的输出调节问题.首先,在事件触发时刻与子系统切换时刻相互混合的情况下,给出了状态反馈控制器的具体形式及基于状态的事件触发机制.其次,通过给出事件触发机制、状态反馈控制器和满足平均驻留时间条件的切换规则联合设计的方案给出了该切换系统输出调节问题可解的充分条件.非共同坐标变换的引入突破了现有文献中调节器方程组具有共同解的限制.为了避免Zeno现象,给出相邻事件触发间隔时间存在一个正下界.最后,将RLC电路模型建模为切换系统,通过Matlab仿真验证了在切换系统事件触发输出调节问题可解前提下,控制器更新频率明显降低,验证了结论的有效性.
| [1] | Ma D, Zhao J. Stabilization of networked switched linear systems:An asynchronous switching delay system approach[J]. Systems & Control Letters, 2015, 77: 46–54. |
| [2] |
王青, 吴振东, 侯砚泽, 等.
面向飞行器控制的切换系统分析与综合[J]. 宇航学报, 2013, 34(2): 147–156.
Wang Q, Wu Z D, Hou Y Z, et al. Analysis and synthesis of vehicle control-oriented switching system[J]. Journal of Astronautics, 2013, 34(2): 147–156. DOI:10.3873/j.issn.1000-1328.2013.02.001 |
| [3] | Chen S, Jiang L, Yao W, et al. Application of switched system theory in power system stability[C]//Proceedings of the Power Engineering Conference. Piscataway, NJ, USA: IEEE, 2014: 1-6. |
| [4] | Hai L, Antsaklis P J. Stability and stabilizability of switched linear systems:A survey of recent results[J]. IEEE Transactions on Automatic Control, 2009, 54(2): 308–322. DOI:10.1109/TAC.2008.2012009 |
| [5] | Liberzon D, Morse A S. Basic problems in stability and design of switched systems[J]. IEEE Control Systems Magazine, 2015, 19(5): 59–70. |
| [6] | Wang D, Wang W, Shi P. Delay-dependent exponential stability for switched delay systems[J]. Optimal Control Applications & Methods, 2010, 30(4): 383–397. |
| [7] | Hespanha J P, Morse A S. Stability of switched systems with average dwell-time[C]//Proceedings of the 38th IEEE Conference on Decision and Control. Piscataway, NJ, USA: IEEE, 2002: 2655-2660. |
| [8] | Huang J. Nonlinear output regulation:Theory and applications[M]. New York, NJ, USA: Prentice-Hall, 2004: 22-24. |
| [9] | Liu Y Z, Zhao J. Output regulation of a class of switched linear systems with disturbances[C]//Proceedings of the 2001 American Control Conference. Piscataway, NJ, USA: IEEE, 2001: 882-883. |
| [10] | Dong X X, Sun X M, Zhao J, et al. Output regulation for switched linear systems with different coordinate transformations[C]//Proceedings of the UKACC International Conference on Control. Piscataway, NJ, USA: IEEE, 2012: 92-95. |
| [11] | Li J, Zhao J. Output regulation for switched discrete-time linear systems via error feedback:An output error-dependent switching method[J]. IET Control Theory & Applications, 2014, 8(10): 847–854. |
| [12] | Long L J, Zhao J. Global robust output regulation for a class of switched nonlinear systems with nonlinear exosystems[J]. Asian Journal of Control, 2015, 16(6): 1811–1819. |
| [13] | Li J, Zhao J. Incremental passivity and incremental passivity-based output regulation for switched discrete-time systems[J]. IEEE Transactions on Cybernetics, 2017, 47(5): 1122–1132. DOI:10.1109/TCYB.2016.2533426 |
| [14] | Pang H B, Zhao J. Output regulation of switched nonlinear systems using incremental passivity[J]. Nonlinear Analysis Hybrid Systems, 2018, 27: 239–257. DOI:10.1016/j.nahs.2017.08.011 |
| [15] |
王君, 李淑真, 李炜.
基于事件触发机制的NCS主被动混合鲁棒H∞容错控制[J]. 信息与控制, 2017, 46(2): 144–152.
Wang J, Li S Z, Li W. Hybrid active-passive robust fault-tolerant control for a networked control system based on an event-triggered scheme[J]. Information and Control, 2017, 46(2): 144–152. |
| [16] |
龙雨强, 凌强, 郑伟, 等.
基于事件触发的网络化控制系统的L2稳定性分析[J]. 信息与控制, 2016, 45(2): 171–176.
Long Y Q, Ling Q, Zheng W, et al. L2 stability analysis networked control systems based on event-triggering[J]. Information and Control, 2016, 45(2): 171–176. |
| [17] | Wang X, Ma D. Event-triggered control for continuous-time switched systems[C]//Proceedings of the 27th Chinese Control and Decision Conference. Piscataway, NJ, USA: IEEE, 2015: 1143-1148. |
| [18] | Qi Y W, Cao M. Event-triggered dynamic output feedback control for switched linear systems[C]//Proceedings of the 35th Chinese Control Conference. Piscataway, NJ, USA: IEEE, 2016: 2361-2367. |
| [19] | Zeng P Y, Qi Y W. LMI-based stabilization for switched linear systems with event-triggering scheme[C]//Proceedings of the 35th Chinese Control Conference. Piscataway, NJ, USA: IEEE, 2016: 2391-2395. |
| [20] | Li T F, Fu J. Event-triggered control of switched linear systems[J]. Journal of the Franklin Institute, 2017, 354(15): 6451–6462. DOI:10.1016/j.jfranklin.2017.05.018 |
| [21] | Qi Y W, Zeng P Y, Bao W, et al. Event-triggered robust H∞control for uncertain switched linear systems[J]. International Journal of Systems Science, 2017, 48(15): 3172–3185. DOI:10.1080/00207721.2017.1367865 |
| [22] | Li T F, Fu J, Deng F, et al. Stabilization of switched linear neutral systems: An event-triggered sampling control scheme[J/OL]. IEEE Transactions on Automatic Control. (2018-01-23)[2018-04-29]. DOI: 10.1109/TAC.2018.2797160. |
| [23] | Knobloch H W, Isidori A, Flockerzi D. Topics in control theory[M]. Berlin, Germany: Birkhauser Verlag, 1993. |
| [24] | Chen X, Hao F. Observer-based event-triggered control for certain and uncertain linear systems[J]. IMA Journal of Mathematical Control & Information, 2013, 30(4): 527–542. |
| [25] | Yaz E E. Linear matrix inequalities in system and control theory[J]. Proceedings of the IEEE, 1994, 86(12): 2473–2474. |
| [26] | Jin C L, Li L L, Wang R, et al. Asynchronous output regulation with passivity control for a class of switched stochastic delay systems[J]. IET Control Theory & Applications, 2018, 11(18): 3269–3277. |