



2. 山东科技大学电气与自动化学院, 山东 青岛 266590
2. College of Engineering and Automation, Shangdong University of Science and Technology, Qingdao 266590, China
0 引言
复杂网络,作为一种大规模系统,由节点、边和拓扑矩阵组成.随着复杂网络的小世界模型[1]和无标度模型[2]的建立,复杂网络模型已经被应用于不同的学科中,如工程学科中的交通网络[3]及社会科学中的社交网络[4]等.因此,研究复杂网络具有非常重要的实际意义.值得注意的是,获取网络状态信息是研究网络动态、同步控制、拓扑识别、牵引控制和故障诊断的前提条件,因此对于复杂网络的状态在工程实践中起着关键的作用.但是,由于在复杂网络中网络节点之间错综复杂的拓扑关系、噪声、通信延迟和测量难度等诸多因素的影响,使得系统的状态信息无法获得,因此如何利用复杂网络的输出进行状态估计也就成了至关重要的问题.到目前为止,对于复杂网络的研究主要是在同步现象和状态估计上.例如,文[5]研究了在噪声干扰下的网络状态估计问题,根据线性矩阵不等式的解给出了状态观测器的增益矩阵,并且同时保证了所规定的H∞性能指标.文[6]设计了一种自适应状态观测器来估计具有传输延迟的复杂动态网络的状态,并且将其应用于估计网络的拓扑识别中.当前处理具有噪声干扰影响的复杂动态网络的滤波问题主要有3种方法:针对有界噪声的最终有界状态估计或集员状态估计[7]、针对概率分布已知噪声的最小方差状态估计[8-9]和针对能量有界噪声H∞的状态估计[10-11].
现代工程和技术系统正朝着大规模和复杂化的方向发展.一旦系统出现故障就会造成巨大的人员和财产损失.因此,有效地保障现代复杂系统的可靠性和安全性具有重要意义.故障诊断技术的出现开辟了一种提高复杂系统可靠性的新途径[12].在过去的几十年中,故障诊断技术取得了飞速发展[13-16].故障诊断技术也已应用于航空航天[17]、机器人[18]和众多的工业过程中,并且取得了巨大的经济效益.若系统发生故障,则会导致复杂网络系统出现性能下降,甚至是系统不稳定的情况[19].由此可见,故障诊断技术对于系统的运行是至关重要的.作为故障诊断理论的重要组成部分,故障估计在获取故障信息中起着关键作用,并且已有大量的文献对这一问题进行了研究.如文[20]提出了随机故障的概念,并提出了一种新的Riccati差分方程的方法来解决有限时域H∞故障估计问题.文[21]研究了一类线性广义系统的状态和故障估计问题,提出了一种新型滤波器,在无偏最小方差意义下对线性离散时间的广义随机系统进行了状态和故障估计.
对于大规模的复杂网络,节点之间的通信可能消耗大量的能量,因此节能问题也变得尤其重要.通过通讯网络对节点的采样值进行传输,并且传输到邻居节点时都会占用大量的通讯资源,从而致使通讯信息丢失或者时延的发生[22].因此本文采用了事件驱动的方式在节点之间进行信息传输.事件触发方案的主要思想是仅在满足预定义触发条件时才能够传输某些信息,从而减少不必要的传输.采用事件触发的传输方法有利于节省有限能量供应的传感器网络的通信成本.文[23]研究了在事件触发方案下网络控制系统的扩展耗散分析和综合问题.所提出的系统被建模为具有合适的事件触发方案的网络控制系统,利用积分不等式和相互凸不等式的方法给出了线性矩阵不等式能保证网络控制系统扩展耗散的充分条件.因此,事件驱动对复杂网络的影响非常重要.然而,复杂网络的故障估计问题尚未得到解决.故本文采用了状态和故障联合估计的方法,并使用鲁棒卡尔曼滤波的方法来递推状态估计.
基于以上讨论,需要研究的关键问题包括:
1) 如何建立评价指标来评价估计效果并构建足够的条件,使估计误差满足给定的性能指标;
2) 在事件驱动传输下对复杂网络系统进行故障估计;
3) 如何建立递推算法来解决时变复杂网络的状态估计问题.
本文首先基于事件驱动方法对复杂网络故障估计问题进行研究;然后,基于递推矩阵方程的解,给出故障估计参数的显式形式.
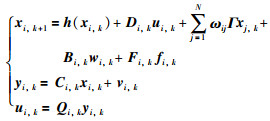
1 问题描述考虑具有N个节点的复杂网络系统:
|
(1) |
其中,xi,k∈Rn为第i个节点的状态向量;初始状态xi,0的均值为xi,0,并且有







在工业过程中,阶跃故障和斜坡故障是两种常见故障.对于阶跃故障和斜坡故障fi,k,定义Δfi,k=fi,k+1-fi,k.假设Δ2fi,k=0,可以通过推导得出Δfi,k为任意常数.
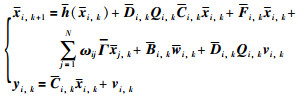
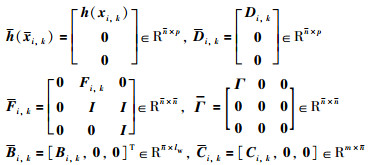
定义增广向量:

|
(2) |
其中,
|
(3) |
其中,
|
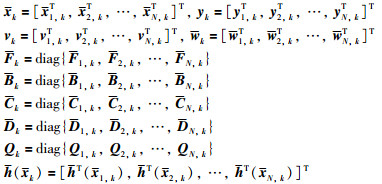
定义:
|
增广系统(3)可改写为
|
(4) |
其中,⊗表示矩阵的克罗内克积.
在本文中,考虑传输结构:采样器在每个时刻对测量输出(4)进行采样,然后把采集到的信息传输到事件发生器.当前测量值yk+j和先前传输的测量值yk满足不等式(5)时,事件生成器将发送当前测量值:

|
(5) |
其中,σ>0.如果式(5)成立,那么将当前测量传送到零阶保持器.考虑到零阶保持器的特性,真实的估计器输入

|
(6) |
其中,ki为第i个传输时刻.
2 状态估计器的设计根据式(4)构建状态估计器:

|
(7) |

|
(8) |
其中,


定义一步预测误差


|
(9) |
通过在


|
(10) |
其中,

|
(11) |
其中,Lk为有界矩阵;Xk为未知的时变矩阵,并且有XkXkT≤I.根据式(9)~式(10)可得
|
(12) |
其中,
|
根据式(8)可得

|
(13) |
本文的研究目的可以归结为2个方面:
1) 是给出估计误差协方差矩阵存在上界的充分条件,即找到一个正定矩阵

|
(14) |
2) 通过设计合适的估计器参数来使
引理1[24] 给出具有适当维数的矩阵A、H、E和F且FFT≤I.设Y为正定对称矩阵,γ为正常数,如有γ-1I-EYET>0,则不等式(15)成立:
|
(15) |
引理2[25] 对于任意给定的有恰当维数的两个向量x,y∈Rn,不等式:

|
成立.其中,ε>0为任意标量.
引理3 对于具有合适维数的矩阵A、B、Y、P,等式:
|
成立.
3 估计器参数的设计在本节中,首先基于式(12)和式(13)计算出一步预测误差协方差矩阵和估计误差协方差矩阵.然后通过选择适当的估计器参数来确定它们的上界并且这个上界在迹的意义下是最小的.
引理4 一步预测误差协方差Zk+1|k满足:
|
(16) |
其中,
|
证明 根据式(9)易得式(16),引理4成立.
引理5 估计误差协方差Zk+1|k+1满足递推:
|
(17) |
证明 式(13)的右端加上一个零项Hk+1yk+1-Hk+1yk+1得

|
(18) |
接下来,对Zk+1|k+1递推可得
|
(19) |
已知
基于引理4~引理5,定理1给出了估计器参数的设计方法,并且保证得到的估计误差协方差的上界是最小的.
定理1 对于联合估计系统(4),如果存在正常数γk、σ和ε,在初始条件Z0|0≤Π0|0下,存在以下两个递推矩阵方程有界,则估计误差协方差Πk+1|k+1是有界的:
|
(20) |
|
(21) |
其中,对于任意的k≥0有不等式Πk|k≤γk-1I成立,并且有:
|
(22) |
并且待设计的估计器参数:

|
(23) |
可以保证估计误差协方差Zk+1|k+1的上界在迹的意义下是最小的,即:

|
(24) |
证明 采用数学归纳法来证明.当t=0时,定理1的假设条件Z0|0≤Π0|0成立.假设当t=k时,有Zk|k≤Πk|k,下面推导当t=k+1时,有Zk+1|k+1≤Πk+1|k+1成立.根据引理1可以得出:
|
(25) |
可得Zk+1|k+1≤Πk+1|k+1.
基于引理2,可以得到不等式:
|
(26) |
根据式(5),对于任意的k有式(27)成立:

|
(27) |
通过对式(26)和式(27)的整理可得:

|
(28) |
由此可得:
|
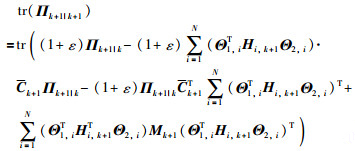
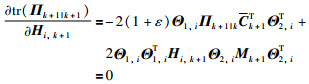
最后证明式(23)给出的估计器参数在迹的意义下是最优的.对式(21)进行整理得

|
(29) |
其中,Mk+1如式(22)所示.
将
|
(30) |
其中Θ1,i和Θ2,i由式(22)定义.通过引理3可得
|
(31) |
根据Θ2,i的性质可知,Θ2,iMk+1Θ2,iT是可逆的并且有Θ1,iΘ1,iT=In×n,又因为Mk+1>0,因此可得

|
至此,给出了估计器参数的设计方法,并且证明了所设计的估计器参数可以使估计误差协方差上界的迹是最小的.定理1成立.
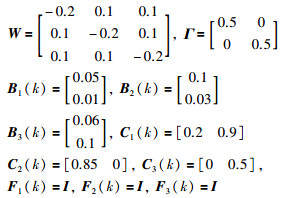
4 数值模拟在本节中,通过仿真算例来证明所提定理的有效性.考虑具有以下参数的复杂网络:
|
故障向量fk为
|
非线性函数h(xk)为

|
根据定理1,对于参数ε=0.1,σ=0.001,γk=0.02,有:
|
状态初始值及状态估计的初始值分别为

|
本文基于事件驱动方法来解决复杂网络系统的故障估计问题.仿真结果如图 1~图 9所示.其中,复杂网络的状态及其估计如图 1~图 6所示,xi,k(i=1,2,3)和

|
图 1 状态x1,1(k)及其估计 |

|
|
图 2 状态x1,2(k)及其估计 |

|
|
图 3 状态x2,1(k)及其估计 |

|
|
图 4 状态x2,2(k)及其估计 |

|
|
图 5 状态x3,1(k)及其估计 |

|
|
图 6 状态x3,2(k)及其估计 |

|
图 7 故障f1(k)及其估计 |

|
|
图 8 故障f2(k)及其估计 |

|
|
图 9 故障f3(k)及其估计 |
本文解决了一类复杂网络系统的故障估计问题.利用增维的方法对系统状态及故障进行联合状态估计.采用了事件驱动机制来调度系统至远程估计器的信号传输.通过递推Riccati方程的解给出了估计误差协方差矩阵的上界,同时设计了适当的估计器参数在迹的意义下优化了该上界.通过仿真验证了本文所提方法的有效性.
| [1] | Strogatz S H, Watts D J. Collective dynamics of 'small-world' networks[J]. Nature, 1998, 393(6684): 440–442. DOI:10.1038/30918 |
| [2] | Barabasi A, Albert R. Emergence of scaling in random networks[J]. Science, 1999, 286(5439): 509–512. DOI:10.1126/science.286.5439.509 |
| [3] | Yao Y, Hong Y, Wu D Q, et al. Estimating the effects of "community opening" policy on alleviating traffic congestion in large Chinese cities by integrating ant colony optimization and complex network analyses[J]. Computers Environmente and Urban Systems, 2018, 70: 163–174. DOI:10.1016/j.compenvurbsys.2018.03.005 |
| [4] | Zhang Y M, Su Y Y, Li W G. Rumor and authoritative information propagation model considering super spreading in complex social networks[J]. Physica A-Statistical Mechanics and ITS Applications, 2018, 506: 395–411. DOI:10.1016/j.physa.2018.04.082 |
| [5] | Lü B, Jiang J L, Cao J D. Robust distributed state estimation for genetic regulatory networks with Markovian jumping parameters[J]. Communications in Nonlinear Science and Numerical Simulation, 2011, 16(10): 4060–4078. DOI:10.1016/j.cnsns.2011.02.009 |
| [6] | Liu H, Lu J A, Hill D J, et al. Structure identification of uncertain general complex dynamical networks with time delay[J]. Automatica, 2009, 45(8): 1799–1807. DOI:10.1016/j.automatica.2009.03.022 |
| [7] | Schweppe F C, Albert R. Recursive state estimation:Unknown but bounded errors and system inputs[J]. IEEE Transactions on Automatic Control, 1968, 13(1): 22–28. DOI:10.1109/TAC.1968.1098790 |
| [8] | Li Q, Shen B, Wang Z D, et al. Event-triggered H∞ state estimation for state-saturated complex networks subject to quantization effects and distributed delays[J]. Journal of the Franklin Institute-Engineering and Applied Mathematics, 2018, 355(5): 2874–2891. DOI:10.1016/j.jfranklin.2018.01.020 |
| [9] | Sheng L, Wang Z D, Zou L, et al. Event-based H∞ state estimation for time-varying stochastic dynamical networks with state-and disturbance-dependent noises[J]. IEEE Transactions on Neural Networks and Learning Systems, 2017, 28(10): 2382–2394. DOI:10.1109/TNNLS.2016.2580601 |
| [10] | Ding D R, Wang Z D, Shen B, et al. H∞ state estimation with fading measurements, randomly varying nonlinearities and probabilistic distributed delays[J]. International Journal of Robust and Nonlinear Control, 2015, 25(13): 2180–2195. DOI:10.1002/rnc.v25.13 |
| [11] | Han F, Wei G L, Ding D R, et al. Finite-horizon bounded H∞ synchronisation and state estimation for discrete-time complex networks:local performance analysis[J]. IET Control Theory and Applications, 2017, 11(6): 827–837. DOI:10.1049/iet-cta.2016.1161 |
| [12] | Cheng S Y, Yang H, Jiang B. An integrated fault estimation and accommodation design for a class of complex networks[J]. Neurocomputing, 2016, 216: 797–804. DOI:10.1016/j.neucom.2016.08.043 |
| [13] | Shi J T, He X, Wang Z D. Distributed fault detection for a class of second-order multi-agent systems:An optimal robust observer approach[J]. IET Control Theory and Applications, 2014, 8(12): 1032–1044. DOI:10.1049/iet-cta.2013.0841 |
| [14] |
杨蒙蒙, 钱伟.
基于神经网络预测的网络化控制系统故障检测[J]. 信息与控制, 2018, 47(1): 36–40.
Yang M M, Qian W. Fault detection of networked control systems based on neural network prediction[J]. Information and Control, 2018, 47(1): 36–40. |
| [15] | Yin S, Zhu X, Kaynak O. Improved PLS focused on keyperformance-indicator-related fault diagnosis[J]. IEEE Transactions on Industrial Electronics, 2015, 62(3): 1651–1658. DOI:10.1109/TIE.2014.2345331 |
| [16] | Zhou D H, Qin L G, He X, et al. Distributed sensor fault diagnosis for a formation system with unknown constant time delays[J]. Science China (Information Sciences), 2018, 61(11): 128–143. |
| [17] | Lu C, Wang S, Wang X, et al. A multi-source information fusion fault diagnosis for aviation hydraulic pump based on the new evidence similarity distance[J]. Aerospace Science and Technology, 2017, 71: 392–401. DOI:10.1016/j.ast.2017.09.040 |
| [18] | Zhou B, Qian K, Ma X D, et al. Ellipsoidal bounding set-membership identification approach for robust fault diagnosis with application to mobile robots[J]. Journal of Systems Engineering and Electronics, 2017, 28(5): 986–995. DOI:10.21629/JSEE.2017.05.17 |
| [19] |
王光, 孙程远, 尹坤.
基于动态全主成分回归质量相关的故障检测[J]. 信息与控制, 2017, 46(6): 671–676.
Wang G, Sun C Y, Yin K. Quality-related fault detection approach based on dynamic total principal component regression component regression[J]. Information and Control, 2017, 46(6): 671–676. |
| [20] | Dong H L, Wang Z D, Ding S X, et al. Finite-horizon estimation of randomly occurring faults for a class of nonlinear time-varying systems[J]. Automatica, 2014, 50(12): 3182–3189. DOI:10.1016/j.automatica.2014.10.026 |
| [21] | Bessaoudi T, Ben H F. Recursive five-step filter for state and fault estimation of linear descriptor stochastic systems with unknown disturbances[J]. Journal of Circuits Systems and Computers, 2018, 27(6): 1850083. DOI:10.1142/S0218126618500834 |
| [22] |
祝超群, 杨彬, 鲁燕春, 等.
随机事件驱动通信的网络化系统最优估计与状态反馈控制[J]. 信息与控制, 2015, 44(6): 654–659.
Zhu C Q, Yang B, Lu Y C, et al. Optimal estimation and state feedback control of networked systems with stochastic event-driven communication[J]. Information and Control, 2015, 44(6): 654–659. |
| [23] | Li M Y, Zhao J L, Xia J W, et al. Extended dissipative analysis and synthesis for network control systems with an event-triggered scheme[J]. Neurocomputing, 2018, 312: 34–40. DOI:10.1016/j.neucom.2018.05.034 |
| [24] | Wang Y, Xie L, de Souza C E. Robust control of a class of uncertain nonlinear systems[J]. Systems and Control Letters, 1992, 19(2): 139–149. DOI:10.1016/0167-6911(92)90097-C |
| [25] | Boyd S, Ghaoul L E, Feron E, et al. Linear matrix inequalities in systems and control theory[M]. Society for industrial and applied mathematics, 1999, 286(5439): 509-512. |