



2. 郑州大学产业技术研究院, 河南 郑州 450001
2. Industrial Technology Research Institute, Zhengzhou University, Zhengzhou 450001, China
0 引言
网络控制系统(NCSs)是将传感器、控制器和执行器通过一个共用的通信网络连接起来的反馈控制系统[1].相较于传统的点对点控制系统,NCSs具备信息资源共享、布线简单、成本低等优点,从而引起人们广泛关注[2-4].由于NCSs中引入了通信网络,数据传输的过程中不可避免出现一些新的问题,如数据包丢失、时延、通信受限等[5-6].这些缺陷使得NCSs的参数乃至整个系统的结构瞬间发生改变,进而展现出不同时间或空间上的多模态特性,这种特性无法使用单一模态的传统连续时间或离散时间系统模型进行描述.然而,使用任意时间切换的切换系统[7]模型可以很好地解决上述问题.因此,使用切换系统理论对NCSs进行分析研究是十分必要的[8].
此外,NCSs的故障检测研究也取得了一些新的进展.文[9]探讨了通信受限和丢包下不确定Delta算子离散系统故障检测问题,其系统模型为单一模态的离散模型,且丢包为单通道丢包;文[10]讨论了网络切换系统存在时变时延和丢包的故障检测和控制器协同设计问题,但所得故障检测滤波器的参数没有显式表示;文[11]给出了连续丢包情形下正切换系统的故障检测问题,其丢包仅发生在传感器至滤波器的数据传输过程中,且没有考虑时延对系统的影响,其离散系统模型为移位算子模型;文[12]则采用神经网络预测控制器对系统输出进行预测,从而补偿丢包对系统的影响,并给出NCSs故障判定的准则.
另一方面,在高速采样时移位算子离散化方法得到的系统模型与之前的连续系统存在一定差距,且采样后系统极点位于稳定环的边界,使得离散化后的系统趋向不稳定.然而,Delta算子可以很好地解决这些困扰,而且系统的采样周期出现在离散化后的系统模型中,便于观察采样周期对系统性能的影响[13].将Delta算子、NCSs和切换系统分析方法三者结合起来研究一个系统的成果尚不多见.文[14]仅仅考虑了时变时延对系统建模的影响,文[15]则进一步考虑了系统中存在时延和参数不确定性时,如何设计故障检测滤波器和分析系统鲁棒稳定性的问题.关于多约束条件下的Delta算子网络切换系统故障检测的研究目前尚处于起步阶段.
本文研究同时存在双通道丢包和时变时延的Delta算子网络切换系统的故障检测问题,给出任意切换律下故障检测滤波器的参数表示,将故障检测滤波器作为残差生成器,使得残差和故障之间的差值尽可能小;借助LMIs给出系统指数均方稳定的充分条件,并得到了最小的扰动抑制水平γ.数值仿真结果验证了所提方法的有效性.
1 问题描述Delta算子定义[13]如下:
|
其中,h代表采样周期.
考虑下面带有时变时延的Delta算子网络切换系统[16]:

|
(1) |
其中,x(k)∈Rn代表系统的状态向量;τ(k)是时变时延且是正整数,满足τm≤τ(k)≤τM,τm、τM分别是时延的下界和上界;u(k)∈Rp为控制输入;d(k)∈Rq是已知的干扰信号,且满足l2[0,+∞);f(k)∈Rm是待检测的故障信号,可为过程故障或执行器故障[17];σ(k)→N={1,2,3,…,n}代表切换信号.系统的初始时刻记为k0,令k1,k2,…,kv表示系统在间隔[k0,k)内的切换点,且k0 < k1 < … < kv < k,v≥1.当σ(k)=i∈N时,表示第i个子系统被激活,在子系统i上停留的时间称为驻留时间;Ai,Aτi,Bi,Di,Fi是具有适当维数的矩阵.
传感器至控制器的数据传输可表示为

|
(2) |
其中,
|
(3) |
这里,α(k)=1代表传感器至控制器的数据传输正常,α(k)=0则表示数据包丢失;Prob{·}表示概率;var{·}表示方差;E{·}表示数学期望.
设计如下基于观测器的故障检测滤波器[10]:
|
(4) |
|
(5) |
式中:

|
(6) |
这里,β(k)=1代表控制器到执行器的数据传输成功,而β(k)=0则表示数据丢失.式(2)中的α(k)和式(6)中的β(k)是相互独立的伯努利白噪声序列.令:
|
(7) |
其中,e(k)代表状态估计误差,
|
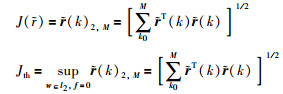
式中,M是仿真步长,T为转置运算,根据下面评价标准判断是否发生故障:当

|
则可以得到如下Delta算子网络切换系统的表达式:
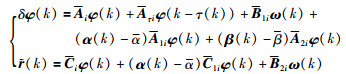
|
(8) |
式中,
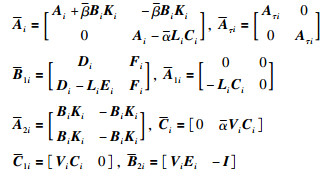
|
I为单位矩阵.
定义1[18] 给定标量0 < λ < 1,零初始条件下,对非零的ω(k)∈l2[0,∞),如果系统(8)是指数均方稳定的且满足:

|
(9) |
则网络化切换时延系统(8)是指数均方稳定的,并且具有H∞性能γ.
定义2[18] 如果存在标量 ∂>0和0 < χ < 1,当ω(k)=0时,
定义3[19] 对于任意k≥k0,给定切换信号σ(τ),k0≤τ≤k,令Nσ表示切换信号σ(τ)在[k0,k)上的切换次数.给定N0≥0和Ta>0,则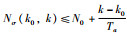
不失一般性,本文假设N0=0.
2 主要结果本节给出了系统(8)是指数均方稳定的,且具有H∞性能γ的充分条件.定理1和定理2证明了系统(8)是指数均方稳定的,且具有H∞性能γ.定理3则基于定理2给出了所设计故障检测滤波器中Ki和Li的表达式.
定理1 给定标量0 < λ < 1,μ>1,任意带有平均驻留时间的切换信号σ(k)满足Ta>Ta=(-ln μ)/ln(1-λ),如果存在正定矩阵Pi、Qi、R1i、R2i,i=1,2,…,n,对于任意的i,j∈N,使得式(10)、(11)成立,则闭环网络切换系统(8)是指数均方稳定的,且满足H∞性能指标γ.
|
(10) |
|
(11) |
式中:
|
|
|

|
证明 对于第i个子系统,定义如下的李亚普诺夫函数:

|
其中:

|
|

|
根据文[18]中的方法,则有:

|
其中:
|
(12) |
|

|
|

|
|

|
根据式(10),由Schur补引理[20]知:

|
所以有:

|
(13) |
令ω(k)=0,由式(10)可知:
|
则有:

|
(14) |
根据式(11)和式(13)可得到:
|
记:
|
|
经过简单计算,可以得到:
|
即:
由
当ω(k)≠0,需要考虑系统(8)的H∞性能.令:
|
式(13)可写作:

|
(15) |
应用递推关系可得:
|
(16) |
为了建立系统(8)的H∞性能指标,选择如下的指数函数:

|
(17) |
根据式(11)、(14)、(16)和文[8]可得:
|
(18) |
在零初始条件下有:
|
(19) |
即:
|
(20) |
进一步计算可得:
|
(21) |
由定义3可知:
|
(22) |
令k→∞,有JN≤0.由定义(1)知中系统(8)具有H∞性能.
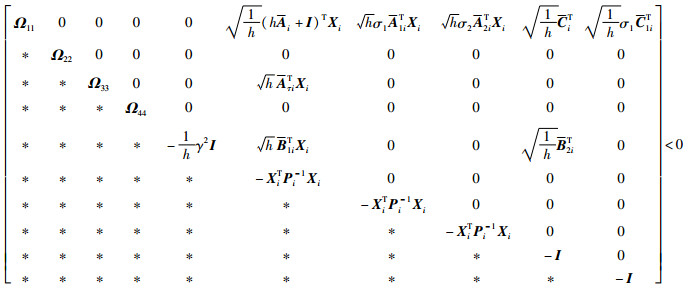
定理2 给定标量0 < α < 1,0 < β < 1,0 < λ < 1和μ>1,如果存在正定矩阵Pi、Qi、R1i、R2i,i=1,2,…,n,矩阵Xi、Ki、Li、Vi,使得式(23)成立,则闭环网络切换系统(8)是指数均方稳定的,且满足H∞性能γ.
|
(23) |
式中:

|

|
|

|
证明 由式(23)可知:Pi-(Xi+XiT) < 0,则有:(Pi-XiT)Pi-1(Pi-Xi)>0,进一步有:-XiTPi-1Xi < Pi-(Xi+XiT),所以式(23)可转化为式(24).利用diag{I,I,I,I,I,Xi-T,Xi-T,Xi-T,I,I}对式(24)进行全等变换,即可将其转换为式(10),证明完毕.
|
(24) |
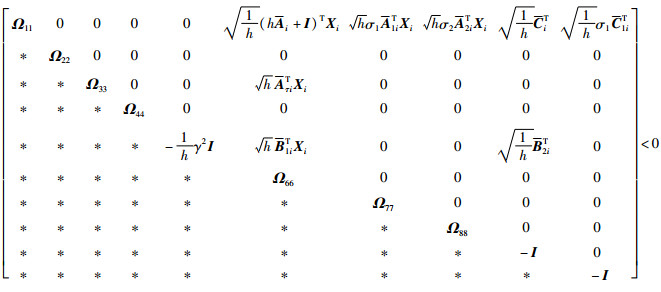
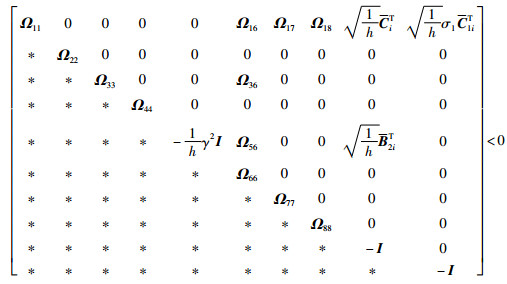
定理3 给定标量0 < α < 1,0 < β < 1,0 < λ < 1和μ>1,如果存在正定矩阵Pi、Qi、R1i、R2i,矩阵Xi=diag{Xi1,Xi1}、Ki、Li、Vi、Mi、L,i=1,2,…,n,使得式(25)、式(26)成立,则闭环网络切换系统(8)是指数均方稳定的,并满足H∞性能指标γ,且控制器增益Ki=(BiT)-T(Xi1-1)TBiMi,滤波器增益Li=(Xi1-1)TLiT.
|
(25) |
|
(26) |
其中,

|

|
|
|
证明将Xi=diag{Xi1,Xi1}代入式(23),可将其转化为式(26),因此系统(8)是指数均方稳定的,且满足H∞性能γ.将Xi=diag{Xi1,Xi1}代入Ω16计算可得:Ω16=

令:KiTBiTXi1=MiTBiT,LiTXi1=Li,则有:Ki=(BiT)-T·(Xi1-1)TBiMi,Li=(Xi1-1)TLiT.证明完毕.
3 算例分析考虑下面具有两个子系统[10, 14]的网络化切换系统,其参数矩阵为
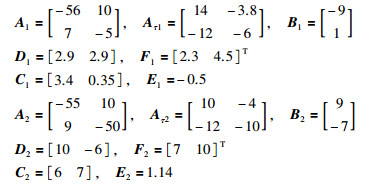
|
给定时延τ(k)=2+[1+(-1)k]/2,采样周期h=0.01,λ=0.05,μ=2.4,则:Ta=-ln μ/ln(1-λ)=17.067 9.
这里,选择不同丢包率验证所提方法的有效性,在上面参数不变的情况下,丢包率的选取必须使得式(25)和(26)具有可行解,才能确保系统(8)是指数均方稳定的,并且满足H∞性能.
情况1 设传感器器到控制器丢包率α=0.8,控制器到执行器丢包率β=0.9.利用LMI求解式(25)和(26)可得控制器增益矩阵:

|
滤波器增益矩阵:

|
残差发生器增益矩阵:

|
最小的扰动抑制:
|
情况2 α=0.5,β=0.7,利用LMI求解式(25)和式(26)可得控制器增益矩阵:

|
滤波器增益矩阵:

|
残差发生器增益矩阵:

|
最小的扰动抑制

|
在情况1中,保持传感器器到控制器的丢包率α=0.8不变,改变控制器到执行器的丢包率β,说明丢包率的改变一定程度上影响系统的H∞性能,见表 1.
| β | 0.8 | 0.7 | 0.6 |
| γmin | 1.020 5 | 1.040 3 | 1.092 8 |
注1 一个稳定运行的网络控制系统对数据包丢失具有一定的鲁棒性,但当丢包率超过系统容许的范围时,将会对系统的控制性能造成严重的影响,甚至导致系统失稳.为了确保增广系统(8)能够稳定运行,我们需要对控制器到执行器通道、传感器至控制器通道的数据包丢失率做一个预设,在Matlab仿真阶段,我们首先选取较大的丢包率来验证系统(8)是否满足定理3中系统稳定性和H∞性能的要求,由于本文所考虑的是双通道数据包丢失,这就造成传感器至控制器的丢包率α和控制器到执行器丢包率β是相互制约的,我们需要经过多次实验来验证丢包率的选取是否恰当,因为丢包率选取不当,将会导致系统失去稳定性.
为验证系统故障检测性能,考虑如下的阶跃突变故障信号:
|
干扰信号d(k)幅值小于0.5,且服从标准正态分布.系统(8)的初始状态为0,图 1为网络化切换系统的切换规则;由图 2可以得出当系统发生故障时,残差误差值将不再趋近0;图 3是系统的状态响应曲线.

|
| 图 1 切换信号 Fig.1 Switched signal |

|
| 图 2 残差误差 Fig.2 Residual error |

|
| 图 3 状态响应 Fig.3 State response |
由图 4可知当发生故障时,所选择的残差评价函数的值将不再和阈值相同,而是在故障信号存在期间逐渐增大.当k=64时,评价函数

|
| 图 4 残差评价函数 Fig.4 Residual evaluation function |
注2 现有表示离散系统的方法有移位算子方法和Delta算子方法,后者更适合高速采样系统[13].当用这两种方法表示同一个离散系统时(如文[10]采用移位算子方法,本文采用Delta算子方法),文[10]中的系统参数矩阵并不能保证本文中系统的稳定性.在确保系统稳定的前提下,文[10]中得到的最小扰动抑制γmin=1.542,在故障发生1个时间步长后检测出故障,而本文得到的最小扰动抑制γmin=1.006 8,在故障发生时就能立刻检测出故障,说明本文所采用的方法抗干扰能力更强,故障检测性能优于文[10].当采用Delta算子方法表示离散系统时,文[16]在故障发生7个时间步长后检测出故障,本文是在故障发生的瞬间就能检测故障信号.
4 结论本文利用Delta算子方法解决了双通道丢包和时变时延约束下的网络切换系统故障检测问题.构建一个任意切换信号下的故障检测滤波器,利用LMI、平均驻留时间等方法证明了增广系统是指数均方稳定的,并得到了最小的H∞性能.仿真结果表明本文所设计的故障检测滤波器的能够快速有效地检测出故障发生的时刻.
| [1] | Walsh G C, Ye H, Bushnell L. Stability analysis of networked control systems[C]//Proceedings of 1999 American Control Conference. Piscataway, NJ, USA: IEEE, 1999: 2876-2880. |
| [2] | Zhang X M, Han Q L, Yu X H. Survey on recent advances in networked control systems[J]. IEEE Transactions on Industrial Informatics, 2016, 12(5): 1740–1752. DOI:10.1109/TII.2015.2506545 |
| [3] | Su L L, Chesi G. Robust stability analysis and synthesis for uncertain discrete-time networked control systems over fading channels[J]. IEEE Transactions on Automatic Control, 2017, 62(4): 1966–1971. DOI:10.1109/TAC.2016.2585124 |
| [4] |
刘婷, 姜顺, 潘丰.
网络控制系统前向通道随机时延的在线多步预测[J]. 信息与控制, 2017, 46(5): 620–626.
Liu T, Jiang S, Pan F. Online multi-step prediction for the random delay of the forward channel in networked control systems[J]. Information and Control, 2017, 46(5): 620–626. |
| [5] |
张端金, 高晓蓓.
通信受限不确定Delta算子网络系统滤波[J]. 系统工程与电子技术, 2017, 39(8): 1864–1870.
Zhang D J, Gao X B. Filtering for uncertain networked systems with limited communication using delta operator[J]. Systems Engineering and Electronics, 2017, 39(8): 1864–1870. |
| [6] | Wang S Q, Jiang Y L, Li Y C, et al. Fault detection and control co-design for discrete-time delayed fuzzy networked control systems subject to quantization and multiple packet dropouts[J]. Fuzzy Sets and Systems, 2016, 306: 1–25. |
| [7] | Sun Z D. Recent advances on analysis and design of switched linear systems[J]. Control Theory and Technology, 2017, 15(3): 242–244. DOI:10.1007/s11768-017-6198-7 |
| [8] |
关治洪, 黄剑, 丁李, 等.
网络控制系统的性能分析与设计[M]. 北京: 科学出版社, 2016.
Guan Z H, Huang J, Ding L, et al. Network control systems:performance analysis and design[M]. Beijing: Science Press, 2016. |
| [9] | Zhao Y Q, Zhang D J. Fault detection for uncertain delta operator systems with packet dropout and limited communication[C]//Proceedings of 2017 American Control Conference. Piscataway, NJ, USA: IEEE, 2017: 4772-4777. |
| [10] |
王申全, 王越男, 庞基越, 等.
基于网络的离散切换时滞系统故障检测和控制器协同设计[J]. 控制与决策, 2017, 32(10): 1810–1815.
Wang S Q, Wang Y N, Pang J Y, et al. Fault detection and control co-design for networked-based discrete-time switched systems with time-varying delays[J]. Control and Decision, 2017, 32(10): 1810–1815. |
| [11] | Wang D, Wang Z D, Li G Y, et al. Fault detection for switched positive systems under successive packet dropouts with application to the Leslie matrix model[J]. International Journal of Robust and Nonlinear Control, 2016, 26(13): 2807–2823. DOI:10.1002/rnc.v26.13 |
| [12] |
杨蒙蒙, 钱伟.
基于神经网络预测的网络化控制系统故障检测[J]. 信息与控制, 2018, 47(1): 36–40.
Yang M M, Qian W. Fault detection of networked control systems based on neural network prediction[J]. Information and Control, 2018, 47(1): 36–40. |
| [13] | Yang H J, Xia Y Q, Shi P, et al. Analysis and synthesis of delta operator systems[M]. Berlin, Germany: Springer, 2012. |
| [14] | Li S, Xiang Z R, Karimi H R. Mixed l_/l1 fault detection observer design for positive switched systems with time-varying delay via delta operator approach[J]. International Journal of Control Automation and Systems, 2014, 12(4): 709–721. DOI:10.1007/s12555-013-0466-1 |
| [15] | Xing J C, Wang R H, Wang P, et al. Robust control for a class of uncertain switched time delay systems using Delta operator[C]//Proceedings of 12th International Conference on Control Automation Robotics and Vision. Piscataway, NJ, USA: IEEE, 2013: 518-523. |
| [16] | Qin C, Xiang Z R, Karimi H R. Robust fault detection for switched systems with time-varying delay using delta operator approach[C]//Proceedings of UKACC International Conference on Control. Piscataway, NJ, USA: IEEE, 2014: 145-150. |
| [17] |
姜斌, 冒泽慧.
网络控制系统的故障诊断[J]. 南京航空航天大学学报, 2009, 41(2): 145–149.
Jiang B, Mao Z H. Fault diagnosis for networked control systems[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2009, 41(2): 145–149. DOI:10.3969/j.issn.1005-2615.2009.02.001 |
| [18] | Park J H, Mathiyalagan K, Sakthivel R. Fault estimation for discrete-time switched nonlinear systems with discrete and distributed delays[J]. International Journal of Robust and Nonlinear Control, 2016, 26(17): 3755–3771. DOI:10.1002/rnc.v26.17 |
| [19] | Zhang D, Yu L, Zhang W A. Delay-dependent fault detection for switched linear systems with time-varying delays-the average dwell time approach[J]. IEEE Transactions on Signal Processing, 2011, 91(4): 832–840. |
| [20] |
俞立.
鲁棒控制——线性矩阵不等式处理方法[M]. 北京: 清华大学出版社, 2002.
Yu L. Robust control-linear matrix inequality method[M]. Beijing: Tsinghua University Press, 2002. |