



2. 甘肃省工业过程先进控制实验室, 甘肃 兰州 730050;
3. 兰州理工大学电气与控制工程国家级实验教学示范中心, 甘肃 兰州 730050
2. Key Lab of Advanced Control for Industrial Process in Gansu Province, Lanzhou 730050, China;
3. National Demonstration Center for Experimental Electrical and Control Engineering Education, Lanzhou University of Technology, Lanzhou 730050, China
0 引言
包含执行器故障的网络化控制系统(NCS)是最常见的故障系统之一.学者们对此提出的被动容错控制(PFTC)和主动容错控制(AFTC)能够很好地处理不同类型的故障. PFTC[1-3]以提前囊括多种故障为优势,应用鲁棒思想使得系统对提前考虑的故障不敏感;而AFTC[2-6]设计故障检测模块对故障进行实时检测,根据故障信息重构或重组控制器.但前者对经验以外的故障无能为力,后者在估计故障[7]时要花费一定的时间,时效性又是一直未能解决的问题,所以结合两者的优点设计控制策略将是一种必然趋势.在此背景下,文[8]针对发生执行器故障的NNCS设计了DETCS下的主—被动混合容错控制器.文[9]在此基础上进行了更复杂的不确定NNCS主被动混合鲁棒H∞容错控制策略研究.
然而上述关于混合容错控制的研究并没有考虑到控制器的非脆弱问题.在实际工业系统中,控制元件本身的物理特性会影响系统的控制性能,并不能直接理想化,为此有学者对存在参数摄动的控制器做了研究.文[10]综合考虑实际系统信号传输中常见的时滞和丢包现象,利用李亚普诺夫理论和改进的自由权矩阵方法,分别设计了具有加性摄动和乘性摄动的非脆弱模糊控制器;文[11]利用Wirtinger类不等式技术研究了有限时间非脆弱无源控制的充分条件,设计了非脆弱状态反馈控制器;文[12]对集执行器饱和、非线性摄动与控制器参数摄动于一体的系统给出了非脆弱鲁棒容错控制器的设计方法.这些关于非脆弱控制的理论成果为后续学者的研究打下了坚实的基础,但相应的容错控制策略仅采用了PFTC,未能引入更高效的AFTC.
应该指出,实际系统中执行器发生的故障是不可预知的,部分故障凭经验可以判断出来,但是大多数故障需要实时检测[13-14]才能估计大小.同时,DETCS[15-16]是相对时间触发机制(PTTCS)提出来的,通过设置事件触发条件“筛选”传输信号而节约网络资源,目前在此基础下的容错控制研究也属于初步阶段.因此,本文将针对NNCS,在系统中引入DETCS节约网络通讯资源,并考虑普遍存在的控制器参数摄动问题,结合AFTC和PFTC的优点设计混合非脆弱容错控制策略,以达到执行器发生任意故障时,控制器都能及时有效地进行控制的目的.
1 问题描述 1.1 DETCS的引入为了节约网络通讯资源,在NNCS中引入DETCS,由事件触发条件决定信号是否传输,DETCS下混合非脆弱容错控制系统结构如图 1所示.

|
| 图 1 系统结构图 Fig.1 Diagram of system structure |
为了便于陈述,假设:
假设1 传感器为时间驱动,采样周期记为h,采样时刻为ikh,采样时刻集合表示为{ikh|ik∈N};控制器和执行器均为事件驱动,若经过事件发生器后信息的传递时刻为tkh,记集合为{tkh|tk∈N},显然,后者是前者的子集.
假设2 系统的状态完全可测,考虑信息在传递过程中存在各种延时,包括从传感器到控制器的网络诱导时延τsctk、控制器到执行器的τcatk及计算过程中产生的时延τctk,则传递时刻tkh的总时延为τtk=τsctk+τcatk+τctk.
假设3 零阶保持器(ZOH)保持当前数据持续输出直至下一组数据到达,这里将ZOH对数据的保持时间t(t∈Ω)进行划分:Ω=∪Ωl,Ωl=[ikh+τik,ikh+h+τik+1),其中ikh=tkh+lh,l=0,…,tk+1-tk-1,ikh表示最新采样时刻,τik和τik+1为采样时刻ikh和(ik+1)h的网络诱导时延.
由图 1可以看出,故障估计器利用源源不断的周期采样信号进行故障估计,以确保不遗漏重要的微小变化的信息,使得估计的结果更加可靠准确,除此之外的所有信息均由事件发生器“筛选”.假设符合触发条件的最新传输数据为x(tkh),当前采样数据为x(ikh),结合系统性能需求和网络资源的节约性,建立事件触发条件[17]:

|
(1) |
其中,状态误差为ex(ikh)=x(ikh)-x(tkh),Ξ为正定对称矩阵,δ∈[0,1)为事件触发标量参数.
1.2 系统模型非线性系统由T-S模糊模型描述,然后由带有单点模糊器、乘积推理机中心平均解模糊器的方法建立,详细过程同文[9],此处不再赘述.最终得到的系统模型为
|
(2) |
|
(3) |
式中,hi(θ(t))表示每一个模糊规则的权重比,即隶属度;θ(t)是模糊前件变量,N是模糊推理规则数;Ai、Bi、Ci、Di分别为对应第i个子系统的具有适当维数的常数矩阵;矩阵L表示执行器可能发生的失效故障,形式为L=diag{l1,…,lm},lq∈[0, 1],q=1,2,…,m,其中lq=0表示第q个执行器完全失效,lq∈(0,1)表示第q个执行器部分失效,lq=1表示第q个执行器正常;x(t)∈Rn,u(t)∈Rm,y (t)∈Rp分别是系统的状态变量、控制输入及控制输出;f(t)∈Rr为执行器加性故障,满足||f(t) ||≤f0,未发生故障时取值为0,发生故障时取值为定值或时变向量;w(t)∈Rq是能量符合w(t)∈L2[0,∞)的外部扰动.这里令Lu(t)=u(t)-f(t),则式(2)、式(3)两种模型等价,为后续主—被动混合非脆弱容错控制器的设计提供了理论依据.
利用平行分布补偿算法(PDC)描述状态反馈控制器为

|
(4) |
其中,Ki为状态反馈控制器增益矩阵;ΔKi为控制器增益干扰,其变化形式为ΔKi=MF(t)Ni,M和Ni为具有适当维数的常数矩阵,F(t)为Lebesgue可测的扰动矩阵且满足FT(t)F(t)≤I.
定义:

|
(5) |
则有x(tkh)=x(t-τ(t))=x(ikh)-ex(ikh),式中含有状态误差ex(ikh),意味着事件触发条件的引入.
1.3 相关引理引理1[18] 对于任意矩阵

|
引理2[19] 对任意实矩阵Xij且1≤i≤r,1≤j≤r,具有适当维数的S>0,有:

|
引理3[20] 对于适当维数的矩阵Y、M、E,FTF≤I,Y=YT,有Y+MF(t)E+ETFT(t)MT < 0,当且仅当∀μ>0,使得Y+μMMT+μ-1ETE < 0.
引理4 对于任意正定对称矩阵W,参数0 < h(t)≤hM及向量值函数ẋ:[-hM 0]→Rn,有积分不等式:
|
注1 为了便于证明时书写,记:
|
符号*代表由对称矩阵块得到的相应矩阵块.
2 主要结果及证明本节将针对DETCS下的非线性执行器故障系统,考虑外界有限能量扰动、数据传输延时及控制元件参数摄动的影响,以保证系统性能为目的,给出故障估计器及主—被动混合非脆弱容错控制器的设计过程.
2.1 故障估计器的设计对于系统模型(2),设计故障估计器:
|
(6) |
其中,Gi、W为待设计的参数矩阵,

|
(7) |
由式(6)、式(7)得误差系统:
|
(8) |
因此,可以将故障估计器的设计问题描述为:设计矩阵Gi、W使误差系统(8)稳定且满足

|
定理1 给定正定标量a、b、c、τm、τM、τs、γ1、γ2,故障估计器(6)使误差系统(8)稳定且具有H∞性能指标J的充分条件是存在正定对称矩阵P、W、Ui、Qi(i=1,…,5)及Vi,满足线性矩阵不等式(9):
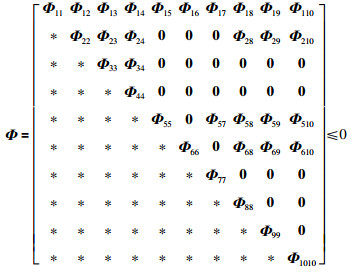
|
(9) |
其中,
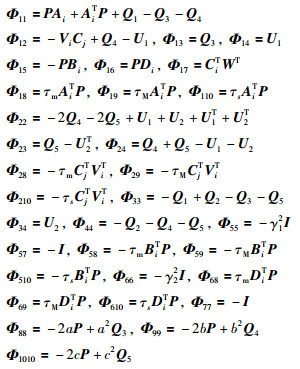
|
证明 选取Lyapunov-Krasovskii泛函:
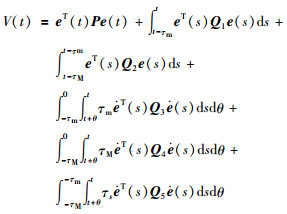
|
(10) |
沿式(8)对V(t)求导得到
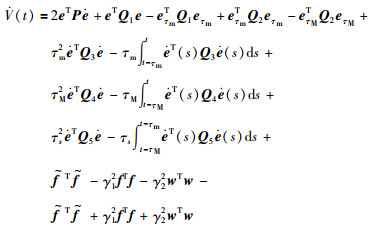
|
应用引理2得
|
其中,

|
应用引理4得

|
应用引理1得
|
又
综合上述各项求导结果得:
|
其中Θ=τm2Q3+τM2Q4+τs2Q5.
令Φ″=Φ′+ΣTΣ+εTΘε,考虑H∞性能指标:
|
当f(t)=0,w(t)=0时,若满足Φ″≤0,则

|
在零初始条件下,取t0=0,当t→∞时,则有:

|
即满足性能指标
由于Φ″不能直接应用LMI(linear matrix inequality)求解,故作变换:
假设Φ′≤0,对Φ″应用Schur补引理,有:
|
其中,
|
对Φ″两端同乘diag{I,I,I,Ι,I,I,I,PQ3-1,PQ4-1,PQ5-1}及其转置作合同变换,并令:
|
即可得Φ≤0且矩阵Gi=P-1Vi.证毕.
2.2 被动非脆弱容错器设计针对式(3)描述的故障系统,本节给出被动非脆弱容错控制器的设计方法.采用状态反馈控制器

定理2 对基于DETCS的非线性系统(3),考虑可能的执行器故障L及控制器参数摄动ΔK,给定正标量μ、γ、τm、τs、τM,σ∈[0,1),若存在正定对称矩阵X及矩阵V、Yj、Ri(i=1,…,7)使得线性矩阵不等式:
|
成立,则系统在外界有限能量扰动存在的情况下仍渐近稳定且具有γ扰动抑制性能.其中,

|
证明 选取Lyapunov-Krasovskii泛函:
|
(11) |
沿式(3)对式(11)求导得
|
当ikh∈[tkh,tk+1h), σ∈[0,1)时,事件触发条件满足:

|
类似于定理1的证明,应用引理1、引理2、引理4得:

|
其中,
|
且:
|
令Ψ″=Ψ′+εTΘε,考虑性能指标:
|
当w(t)=0时,若满足Ψ″≤0,则

|
在零初始条件下,取t0=0,当t→∞时,则有:

|
即故障系统满足性能指标||y(t)||2≤γ2||w(t)||2.
为了便于LMI工具箱求解,还应对Ψ″进行处理.应用Schur补,有:
|
由引理3得

|
其中,
|
再次应用Schur补,有:
|
其中,
|
对Ψ″两端分别左乘、右乘diag{P-1,P-1,P-1,P-1,P-1,I,Q3-1,Q4-1,Q5-1,I,I}做合同变换.然后令P-1=X,Ξ-1= V,KjP-1=Yj,Qi-1=Ri(i=1,…,5),U1-1=R6,U2-1=R7,再做变换:
|
即可得到定理2中的线性矩阵不等式Ψ≤0,控制器增益矩阵由Kj=YjX-1得到.
2.3 混合非脆弱容错控制器设计从图 1所示的结构图可知,对于故障NNCS,由定理2设计的被动非脆弱容错控制律up(t)确保系统在正常运行和集内故障发生时保持稳定,在集外故障发生初期减缓系统性能下降的速度,同时由定理1设计的故障估计器在线实时估计系统故障信息,继而重构控制器以补偿未知故障对系统性能的影响.
针对式(2)描述的非线性系统,在建立故障估计器的基础上,以故障与状态联合作为系统输入,设计混合非脆弱容错控制器,其形式为

|
(12) |
这里,up(t)为定理2设计的状态反馈控制器;F+为Bi的右伪逆,矩阵Ei=-Bi,在条件rank(F,Ei)=rank(F)存在的情况下满足(I-FF+)Ei=0;
|
(13) |
令

|
(14) |
由定理1保证ef(tkh)渐近收敛,故此处将其视为一种外界干扰.
注2 τ(t)ḟ(t)描述了系统连续故障的内采样特性,若f(t)为连续故障,则在系统方程中保留这一项并做进一步处理,若f(t)为突发恒定故障,则f(t)=f(tkh),系统中不存在微分项.本文考虑第2种情况,故以下证明中将ḟ(t)所在项去掉,第1种情况将在后续研究中讨论.
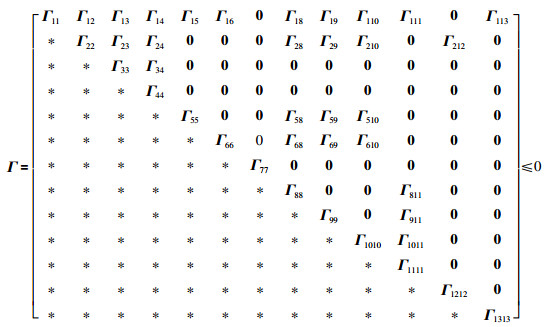
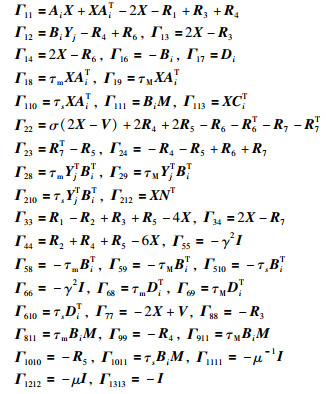
定理3 针对控制系统(13),给定参数σ∈[0,1)、μ、γ、τm、τs、τM,若存在正定对称矩阵X及矩阵Ri(i=1,…,7),V、Yj使线性矩阵不等式:
|
成立.其中,
|
则设计的非脆弱控制器(12)可使故障NNCS在数据传输延时、外界干扰及控制元件参数摄动均存在的情况下,在引入DETCS节约一定网络资源的同时保持系统渐近稳定,并满足H∞性能指标:

|
定理所设计的控制器增益由Kj=YjX-1得到,事件触发权矩阵由Ξ=V-1得到.
证明过程与定理2相似,此处不再赘述.
3 仿真算例为了更好地验证上述控制策略的正确性和有效性,引用文[9]中的数值模型,选取的模糊隶属度函数分别为M1(x2)=sin2x2,M2(x2)=cos2x2,系统的模糊规则为:
R1:如果x2是M1,则:

|
R2:如果x2是M2,则:

|
其中,
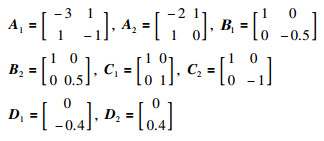
|
且矩阵ΔKi=MF(t)Ni(i=1,2)中
|
假设系统状态初始值为x(0)=[2, -2]T,定理中常数参数取值分别为τm=0. 1,τM=0. 3,τs=0. 2,a=0. 3,b=0. 01,c=0. 6,γ1=3. 5,γ2=2. 5,γ=2. 5,ε=2,σ=0. 3.
根据定理1设计的故障估计器得到相关参数矩阵为
|
其故障估计图如图 2所示.

|
| 图 2 故障估计响应曲线 Fig.2 Response curves of the faults' estimation |
考虑故障


|
| 图 3 不同控制下状态x1的响应曲线 Fig.3 Response curve of state x1 in different control action |

|
| 图 4 不同控制下状态x2的响应曲线 Fig.4 Response curve of state x2in different control action |
若系统运行至5 s时发生集内故障,运行至15 s时发生突发未知故障f(t)=0 0.5T,则在图 2所示估计故障信息的基础上,采用本文所设计的混合非脆弱容错控制策略,其状态响应曲线在仿真图中用S3表示.为了进一步说明混合控制器的容错性能,同时将PFTC(仿真图中用S1表示)和AFTC(仿真图中用S2表示)方法应用于系统并进行对比.如图 3和图 4所示,系统在无故障情况下,3种控制策略都能保证系统稳定运行;当系统发生集内故障,PFTC和混合非脆弱容错控制器都在设计时提前考虑了执行器可能发生的故障集,所以能很好地对故障鲁棒,而AFTC是根据估计的故障进行控制器重构补偿,系统稳定趋势比较缓慢;当系统发生集外故障时,AFTC和混合容错控制器都能够及时减缓系统性能下降的速度,最终渐近稳定并具有γ扰动抑制性能,而PFTC对故障的鲁棒性较弱.此例子验证了混合非脆弱容错控制方法比单一的PFTC和AFTC具有更好的容错效果.
如图 5所示是DETCS下信号传递时刻与传输间隔关系图,取采样周期h=0.05 s,事件触发参数σ=0.3,从纵轴数据可以看出引入的DETCS使系统不定间隔地传输数据,相比于PTTCS的周期传输,DETCS在保证系统性能的情况下节约了一定的网络资源.

|
| 图 5 DETCS下传输时刻与传输间隔关系图 Fig.5 Relationship between transmission time and transmission interval in DETCS |
本文针对T-S模糊模型描述的NNCS,在系统中存在控制元件干扰、执行器故障、外界存在有限能量扰动及数据传输有延时的情况下,研究了混合非脆弱容错控制器的设计方法.采用李亚普诺夫稳定性理论设计被动非脆弱容错控制器,能够对集内的执行器失效故障及控制元件的加性摄动鲁棒,同时应用H∞思想设计故障估计器,当发生集外故障时根据估计的故障信息重构控制器,从而使得NNCS存在有限能量扰动时是渐近稳定的,并具有γ扰动抑制性能.仿真结果表明本文所提的DETCS下的混合非脆弱容错控制策略较单一PFTC和AFTC具有明显的控制优势.为了进一步节约网络资源,后续工作中将在故障检测模块前引入事件触发机制,讨论系统在变采样情况下如何检测故障并进行故障调节的问题.
| [1] |
肖会芹, 何勇, 吴敏, 等.
基于T-S模糊模型的采样数据网络控制系统H∞输出跟踪控制[J]. 自动化学报, 2015, 41(3): 661–668.
Xiao H Q, He Y, Wu M, et al. H∞Output tracking control for sampled-data networked control systems in T-S fuzzy model[J]. Acta Automatica Sinica, 2015, 41(3): 661–668. |
| [2] | Stefanovski J. Fault tolerant control of descriptor systems with disturbances[J/OL]. IEEE Transactions on Automatic Control, DOI:10.1109/TAC. 2018.2827702.[2018-04-16].http://xueshu.baidu.com/s?wd=paperuri%3A%2817cc82b75ae274fbe18ecda00c82e87a%29&filter=sc_long_sign&tn=SE_xueshusource_2kduw22v&sc_vurl=http%3A%2F%2Fieeexplore.ieee.org%2Fdocument%2F8338411%2F&ie=utf-8&sc_us=15849368342258922070. |
| [3] | Fan J H, Zhang Y M, Zheng Z Q. Robust fault-tolerant control against time-varying actuator faults and saturation[J]. IET Control Theory & Applications, 2012, 6(14): 2198–2208. |
| [4] |
刘聪, 钱坤, 李颖晖, 等.
基于LMI的一体化鲁棒主动容错控制器设计[J]. 控制与决策, 2018, 33(1): 53–59.
Liu C, Qian K, Li Y H, et al. Integrated robust active fault tolerance controller design based on linear matrix inequality[J]. Control and Decision, 2018, 33(1): 53–59. |
| [5] | Zhang J, Pang Z, Zhou Y, et al. Active fault tolerant control for networked control systems with actuator fault[C]//Chinese Control Conference. Piscataway, NJ, USA: IEEE, 2016: 7521-7525. |
| [6] |
卢颖.不确定非线性系统的故障/扰动重构及容错控制[D].重庆: 重庆大学, 2016. Lu Y. Fault/Noise Reconstruction and fault-tolerant control of nonlinear uncertain systems[D]. Chongqing: Chongqing University, 2016. |
| [7] |
王振华, 沈毅.
广义系统的有限频域故障估计器设计[J]. 自动化学报, 2018, 44(3): 545–551.
Wang Z H, Shen Y. Fault estimator design for descriptor systems in finite frequency domain[J]. Acta Automatica Sinica, 2018, 44(3): 545–551. |
| [8] | Wang J, Yao X Y, Li W. Hybrid active-passive robust fault-tolerant control of event-triggered nonlinear NCS[J]. Open Electrical & Electronic Engineering Journal, 2017, 11(1): 68–86. |
| [9] |
王君, 姚晓婉, 李炜.
NNCS混合容错控制方法[J]. 控制与决策, 2018(2): 316–329.
Wang J, Yao X W, Li W. Hybrid fault-tolerant control method research of NNCS[J]. Control and Decision, 2018(2): 316–329. |
| [10] |
肖会芹, 何勇, 吴敏, 等.
基于T-S模糊模型的网络控制系统非脆弱H∞跟踪控制[J]. 控制与决策, 2015, 30(1): 110–116.
Xiao H Q, He Y, Wu M, et al. Non-fragile H∞ tracking control for networked control systems based on T-S fuzzy model[J]. Control and Decision, 2015, 30(1): 110–116. |
| [11] | Rajavel S, Samidurai R, Cao J D, et al. Finite-time non-fragile passivity control for neural networks with time-varying delay[J]. Applied Mathematics & Computation, 2017, 297: 145–158. |
| [12] |
曹慧超, 李炜.
执行器饱和不确定NCS非脆弱鲁棒容错控制[J]. 控制与决策, 2013, 28(12): 1874–1883.
Cao H C, Li W. Non-fragile robust fault-tolerant control for uncertain NCS with actuator saturation[J]. Control and Decision, 2013, 28(12): 1874–1883. |
| [13] |
杨光红, 张志慧.
基于区间观测器的动态系统故障诊断技术综述[J]. 控制与决策, 2018, 33(5): 769–781.
Yang G H, Zhang Z H. Review of interval observer based fault diagnosis techniques for dynamic systems[J]. Control and Decision, 2018, 33(5): 769–781. |
| [14] |
王日俊, 白越, 曾志强, 等.
基于自适应观测器的四旋翼无人飞行器传感器故障诊断方法[J]. 传感技术学报, 2018, 31(8): 1192–1200.
Wang R J, Bai Y, Zeng Z Q, et al. Sensor fault diagnosis method for quadrotor aircraft based on adaptive observer[J]. Chinese Journal of Sensors and Actuators, 2018, 31(8): 1192–1200. DOI:10.3969/j.issn.1004-1699.2018.08.010 |
| [15] | Peng C, Yang T C. Event-triggered communication and H∞ control co-design for networked control systems[J]. Automatica, 2013, 49(5): 1326–1332. DOI:10.1016/j.automatica.2013.01.038 |
| [16] | Liu J, Yue D. Event-triggering in networked systems with probabilistic sensor and actuator faults[J]. Information Sciences, 2013, 240(10): 145–160. |
| [17] |
王君, 李淑真, 李炜.
基于事件触发机制的NCS主被动混合鲁棒H∞容错控制[J]. 信息与控制, 2017, 46(2): 144–152.
Wang J, Li S Z, Li W. Hybrid active-passive robust fault-tolerant control for a networked control system based on an event-triggered scheme[J]. Information and Control, 2017, 46(2): 144–152. |
| [18] | Yang F, Zhang H, Wang Y. An enhanced input-delay approach to sampled-data stabilization of T-S fuzzy systems via mixed convex combination[J]. Nonlinear Dynamics, 2014, 75(3): 501–512. DOI:10.1007/s11071-013-1080-8 |
| [19] | Yang F, Zhang H, Hui G, et al. Mode-independent fuzzy fault-tolerant variable sampling stabilization of nonlinear networked systems with both time-varying and random delays[J]. Fuzzy Sets & Systems, 2012, 207(26): 45–63. |
| [20] |
邱爱兵, 吉虹钢, 顾菊平.
非均匀采样数据系统时变故障估计与调节最优集成设计[J]. 自动化学报, 2014, 40(7): 1493–1504.
Qiu A B, Ji H G, Gu J P. Optimal integrated design of time-varying fault estimation and accommodation for nonuniformly sampled data systems[J]. Acta Automatica Sinica, 2014, 40(7): 1493–1504. |