



2. 上海理工大学光电信息与计算机工程学院, 上海 200093
2. University of Shanghai for Science and Technology, Shanghai 210093, China
0 引言
随着通信技术以及传感器技术的快速发展,跨地域地监测与控制某些物理系统已经日益普遍,于是网络化控制系统(networked control systems,NCSs)的概念应运而生.在网络化控制系统中,控制器、执行器以及传感器是分布式装置的,它们通过一个公共的数字化网络相连接,实现信息交换与反馈,告别了传统的点对点式的连接方式,其安装方便、灵活,后期维护简单,近几年来,受到了控制界的广泛关注.网络控制系统目前在各个领域都有应用,如工业自动化、环境监测、多智能体协同以及智能电网等.网络控制系统在带给业界诸多便利的同时,也带来了不少严峻的技术挑战,其中就包括受限的网络信道资源以及网络安全问题.前者要求设计者在保证系统正常工作的同时,尽可能地提高通信效率或节省网络通信资源,后者则要求设计控制系统时,要考虑对应的主动防御策略,以尽可能降低恶意攻击者对系统安全造成的影响.
为了节省通信信道资源和控制器的计算资源,事件触发的采样机制被提出,不同于传统的时间驱动采样机制,其可以根据预先设定的依赖状态的阈值函数和系统的动态过程,在线智能地触发状态信息,从而很大程度上减少时间驱动采样机制带来的不可避免的冗余的数据传输.文[1-2]提出了针对状态反馈控制系统的事件触发策略,保证系统性能的同时,有效延长了控制周期,然而这种基于连续检测状态信息的事件触发机制需要额外的硬件设备支持,某些系统因物理限制,可能难以实现.文[3-4]提出了一种自触发策略,依据目前系统状态信息,估计下次触发时刻,进一步延长了控制周期.特别要指出的是,以上两种方法为避免Zeno现象,均需要推算两次触发时刻之间的最小间隔时间,这给系统设计带来了一定阻碍.为了自然地避免Zeno现象,文[5-6]提出了一种离散型事件触发机制,其传感器是周期采样的,而触发时刻却是由事先设计的阈值函数决定的,虽然这样的机制避免了Zeno现象的发生,但是文章却没有给出控制器与事件触发函数的协同设计方法,触发函数与系统的控制性能往往是相互约束的,这样分离式的设计方法会带来一定程度的保守性.文[7]通过构造李亚普诺夫泛函的方法,提出了离散型事件触发函数与控制器的协同设计方法,为之后该领域的研究指明了新的方向.之后,大量的文章将事件触发机制成功运用到不同的工程领域[8-12].
目前几乎所有相关文献中,事件触发函数的设计均是基于当前采样数据包与上一个释放的数据包之间的相对误差,这样的决策方式本身亦会存在一定程度的局限性.因为最近释放的多个数据包均有一定的决策参考价值,只比较前面一个释放的数据包某些时候会无法真实反映系统动态进程.例如,从系统状态响应角度分析,当曲线在峰值附近时,两点之间的相对误差几乎为零,这会导致仅少量的甚至没有数据包被释放,然而,为了保证系统性能,往往应该释放更多的数据包;再例如,当系统趋于稳定时,若遭受了微小的扰动,状态可能会有短暂的变化,而这时若仅着眼于上一个触发的数据包,可能又会释放不必要的数据包.综上,仅与前面一个释放的数据包做比较并设计触发函数,往往不能准确判断系统动态性能,仍有待改进.受此启发,本文设计了一种基于缓存器的记忆性事件触发机制,使得当前采样数据包与前面多个数据包做加权比较成为可能,并且设计了与之相匹配的状态反馈控制器.
除信道约束外,网络化控制系统目前面临的另外一项重大挑战是网络的安全稳定问题.由于网络控制系统的通信是依赖于暴露的没有保护的数字化无线通信网络,这使得其容易遭受不法分子或者恶意攻击者的网络攻击,进而使整个系统瘫痪.如:2015年12月23日乌克兰电网遭受协同攻击导致近8万用户家庭突发停电,2017年Onion勒索病毒攻击事件等,均造成严重的经济损失.可见,对于网络攻击下的网络控制系统安全控制研究尤为重要.常见的网络攻击可以分为两大类型,一种是欺骗攻击,一种是拒绝服务(DoS)攻击.前者主要通过拦截通信网络中的信号,经过篡改后重新放回通信网络,从而破坏系统的稳定性;后者则是恶意占用通信网络,造成网络拥堵,使得系统中正常的数据信息无法传送,从而造成网络瘫痪.本文主要研究DoS攻击,事件触发机制本身就过滤掉了大量冗余状态信息,网络中传输的均为相对有价值的数据,如果再遭受DoS攻击,使得触发的数据无法传输,将会对系统带来更加严重的打击,因此,研究事件触发机制下,网络控制系统对DoS攻击的主动防御策略具有非常重要的意义.
近年来,许多专家学者对DoS攻击下网络控制系统的安全控制问题做了大量研究,也有许多优秀的文章可以借鉴,DoS攻击根据其信号的特性,亦可大致分为两类,一类是周期性攻击信号,相关研究可参考文[13-15],另一类是非周期性攻击信号,可参考文[16-18].然而,对于DoS攻击下网络控制系统的事件触发控制问题尚处于起步阶段,仍然有很多问题值得探讨.本文着重探讨网络化控制系统在遭受周期性PWM型攻击信号下的记忆型事件触发安全控制策略,非周期性的DoS攻击信号建模及相关研究将会是本文下一步的重点工作,若网络化控制系统可以同时适应周期和非周期性的DoS攻击信号,将会大幅提高系统的主动防御能力.事件触发机制下,针对DoS攻击下主动防御策略的研究,这里简单列举如下:文[17]巧妙利用事件触发参数,针对电网的负载频率控制问题,提出一种弹性事件触发控制方法,利用释放的冗余数据抵消DoS攻击的影响,但是该方法对DoS攻击的建模不够具体,而且主动牺牲了宝贵的信道资源.文[19]通过设计状态估计环节,研究了多智能体协同控制问题中的DoS攻击下的事件触发控制问题,但是并没有给出事件触发及攻击参数、控制器的协同设计方法.文[15, 21]将DoS攻击建模为有最小睡眠时间的PWM型攻击信号,并且给出了离散型事件触发机制与反馈控制器的协同设计方法,但是其事件触发方案仍然采用传统的与上一次触发事件比较的相对误差型,故仍可进一步改进.
基于上述分析,本文从周期性DoS攻击信号入手,将DoS攻击建模为部分信息已知的PWM型信号,并在攻击影响之下,设计基于缓存器型的事件触发方案,构造与之对应的分段李亚普诺夫泛函,通过线性矩阵不等式技术,给出DoS攻击特性与事件触发参数以及控制器反馈增益的协同设计方法,并最终使得网络控制系统实现指数稳定.
1 问题描述和建模 1.1 系统模型本文考虑如图 1所示的网络化控制系统,由图可知,控制器、事件触发器和执行器是通过一个公共的数字化无线网络相连接的.在事件触发器与控制器端分别装置数据缓存器用以在线存储最近释放的多个数据包,进而辅助设计记忆型事件触发策略.周期性PWM型DoS攻击同时发生在事件触发器—控制器端通信网络与控制器—执行器端通信网络,意味着在攻击发生时,采样信号与控制信号均不能正常传输.

|
| 图 1 记忆时间触发和DoS攻击下的网络控制系统结构图 Fig.1 Framework of NCSs under memory event-triggered scheme and DoS attacks |
被控对象的状态空间模型可以用以下线性时不变系统来描述:

|
(1) |
其中,x(t)是系统状态,u(t)是系统输入,A和B是适当维数的常数矩阵.
传感器采用时间驱动模式,且以定常采样周期h对系统状态进行采样,采样时刻记为kh,(k=0,1,2,…),触发器按照预先设定的判决函数决定是否触发最新采样的数据,触发时刻记为tkh,(k=0,1,2,…),显然{tkh}⊂{kh}.触发器的设计方法将在下文进行详细阐述.控制器采用事件驱动模式,在触发信号更新之前,控制器信号通过零阶保持器保持,则状态反馈控制器可表示为

|
(2) |
其中,K为控制器反馈增益.
本文假设系统的状态均为可监测的,并且不考虑网络诱导延迟、丢包以及数据包错序等.
1.2 周期性PWM型DoS攻击模型攻击者通常会对网络控制系统中的通信网络发起攻击,恶意占用通信网络,造成网络拥堵,进而使得系统无法进行正常的数据通信,破坏系统的稳定性.本文将DoS攻击建模为周期性的攻击信号,其每个周期时长为T,考虑到攻击者能量受限以及其利于隐蔽性的事实,在每个周期内,其存在不定时长的休眠期Toff,并存在一个最小的休眠期Tmin≤Toff,则DoS攻击可以描述为

|
(3) |
其中,n∈{0,1,2,…},Hn表示第n个攻击周期,定义区间I1,n 
假设DoS攻击同时发生在触发器—控制器网络与控制器—执行器网络,则在每个攻击周期内,I1,n区间内两个网络均可以正常通信,而在I2,n区间内触发的数据与控制信号均无法正常传输.本文假设攻击是可检测的,即每个周期内DoS攻击的开始以及结束是可知的,而且PWM攻击信号为上升沿有效,即在每个周期内时刻nT+Toff不能正常通信,而时刻(n+1)T是可以进行通信的.于是,考虑DoS攻击,控制信号(2)可以重新改写为

|
(4) |
其中{tk,nh}表示第n个攻击周期中,触发器触发时刻的序列,且t0,n+1h
在第n个攻击周期下,定义系统任意两次触发时刻tkh,tk+1h之间的时间间隔为Dk,n
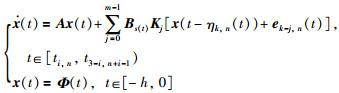
至此,系统(1)可以重写为

|
(5) |
于是,DoS攻击下的网络控制系统被建模为(5)这样的一个切换系统.接下来,基于模型(5),设计与之匹配的记忆型事件触发器,并且研究其指数稳定性.
1.3 记忆型事件触发器设计在这一部分,本文将介绍一种新型的记忆型事件触发机制,该种机制允许当前采样信号与之前触发的多个采样信号作比较,从而使得触发器可以更加准确地判断系统动态进程,进而更加智能地释放采样信号,进一步改善控制系统的性能.在此之前,借鉴文章[7]的区间划分方法,对两次触发信号之间的时间间隔做以下细致划分:

|
其中,k∈{0,1,2,…k(n)},Rk,ni=[tk,n+1h+ih,tk,n+1h+ih+h),Rk,nρk,n=[tk,n+1h+ρk,nh,tk+1,n+1h),ρk,n
综合前文的分析,可得
如图 1所示,触发器端与控制器端设置了缓存器,假设其容量为m∈N+,代表它可以存储从当前采样时刻开始往前的m个已经触发的数据包,用来辅助触发器决策当前采样信号是否释放.若当前采样信号需要释放以更新控制信号,则当前采样信号被存储到缓存器中,缓存器中最旧的数据包被删除,这样,存储器的容量便可以固定为m.
定义当前采样信号与缓存器中的信号的相对误差为

|
(6) |
至此,记忆型事件触发控制器的判决条件可以描述为

|
(7) |
其中,0 < μj < 1且
由(7)式可见,设计的记忆型事件触发方法考虑到了前面m个已经触发的数据信息,并且可以通过调节加权系数决定每个存储的数据的重要程度,通常最新的数据包,认为最有价值,即μ0选取相对较大值.xk,n+1为之前触发的m个数据包的平均值,相对于传统的事件触发方法——只参考之前触发的一个数据包来说,xk,n+1更能反映系统动态过程的趋势.
由ηk,n(t)的定义以及式(6),可得以下关系:

|
(8) |
为与记忆型事件触发机制相对应,本文在(5)基础上还设计了如下反馈控制器,∀t∈[tk,n+1h,tk+1,n+1h),k∈(0,1,2,…):
|
(9) |
综合以上分析,系统(5)可以进一步整理为
|
(10) |
当t∈[-h,0)时,x(t)=Φ(t)为系统的初始状态.为方便建立分段李亚普诺夫泛函,参考文[15],定义下列分段函数:

|
则可得,Ii,n=[ti,n,t3-i,n+i-1),s(ti,n)=i,s(ti,n-)=3-i.
由以上定义,可使得切换系统(10)统一写为
|
(11) |
其中,B1=B,B2=0.
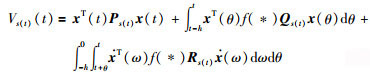
为进一步分析切换系统(11)的稳定性以及其触发器参数与反馈控制器增益的协同设计问题,构造以下分段李亚普诺夫泛函:
|
(12) |
其中,
接下来,本文的主要工作是围绕式(12)所示的能量函数,在记忆型事件触发器机制(7)下,考虑周期性PWM型DoS攻击(3),研究使得网络化切换系统(11)达到指数稳定的控制策略.为使得系统可以抵御最坏程度的攻击,本文假设每个攻击周期内攻击者的休眠时间均为最小休眠时间,即Toff=Tmin.
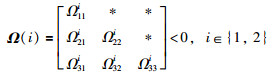
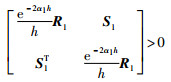
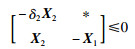
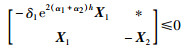
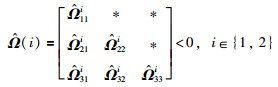
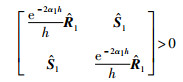
2 主要结果 2.1 稳定性分析引理1 假设系统遭受了周期T和最小休眠时间Tmin已知的PWM型DoS攻击{Hn}n∈{0,1,2,…}(3).对于网络化切换系统(11),在给定缓存器大小m,事件触发参数σ∈(0,1),uj,j∈{0,1,…,m-1},控制器反馈增益Kj,j∈{0,1,…,m-1},标量αi>0,i∈{1,2}以及传感器采样周期h < Tmin的情况下,如果存在正定对称矩阵Pi,Qi,Ri和W,恰当维数的矩阵Si,i∈{1,2},使得下列线性矩阵不等式满足:
|
(13) |
|
(14) |
|
(15) |
其中,







① I表示合适维的单位矩阵
则对于t∈[ti,n,t3-i,n+i-1),i∈{1,2},n∈N,分段李亚普诺夫泛函(12)满足以下结论:

|
(16) |
证明 当t∈[t1,n,t2,n)时,即s(t)=1,对式(12)关于t求导,可得
|
(17) |
对于积分中的交叉项,本文采用文[22]提出的放缩处理方法,即
|
其中,β1T=xT(t)-xT(t-ηk,n(t)),β2T=xT(t-ηk,n(t))-xT(t-h).结合Schur补引理,式(17)不等号右边部分可以整理为ξT(t)Ω(1)ξ(t),ξ(t)=[xT(t),xT(t-ηk,n(t)),xT(t-h),ek,nT(t),ek-1,nT(t),…,ek-m-1,nT(t)]T,由引理1可得

|
(18) |
当t∈[t2,n,t1,n+1)时,即s(t)=2,同样,对式(12)关于t求导,可得
|
参考前文类似的分析过程,可以得到当t∈[t2,n,t1,n+1)时

|
(19) |
综上所述,线性矩阵不等式组(13)~(15)可以保证推出结论(16),至此,证毕.
定理1 假设系统遭受了周期T和最小休眠时间Tmin已知的PWM型DoS攻击{Hn},n∈{0,1,2,…}(3).给定标量δi∈(1,+∞),αi∈(1,+∞),i∈{1,2}以及采样周期h∈(0,Tmin),网络切换系统(11)在设计的反馈控制器增益Kj,j∈{0,1,…,m-1}和记忆型事件触发参数m和μj,j∈{0,1,…,m-1},σ∈(0,1)的条件下是指数稳定的且衰减率为
|
(20) |
其中,γ=e2(α1+α2)h,λ
证明 由引理1可得,∀t≥0,分段李亚普诺夫函数满足

|
(21) |
同时,由式(20)易推得
|
(22) |
对于任意的时刻t,均可以找到对应的第n个攻击周期以及周期内对应的区间[t1,n,t2,n)或[t2,n,t1,n+1),结论(21)和(22)建立了两个区间的联系.利用此,可方便递推出任意时刻t对应的李亚普诺夫泛函与初始时刻的李亚普诺夫泛函的关系式,进而分析控制系统的稳定性.
当[t1,n,t2,n)时,
|
其中,t < t2,n=nT+Tmin,n>[(t-Tmin)/T],故最终可得
|
(23) |
当[t2,n,t1,n+1)时,同理可得
|
(24) |
为方便表示,在此定义
|
(25) |
由式(12)的定义,可进一步推得
|
(26) |
结合式(23)以及式(24),最终可得

|
(27) |
至此,可说明系统(11)在记忆型事件触发机制(7)下,遭受周期性PWM型DoS攻击(3)时,仍然可以实现指数稳定,证毕.
2.2 事件触发参数与控制器协同设计定理2 假设系统遭受了周期T和最小休眠时间Tmin已知的PWM型DoS攻击{Hn},n∈{0,1,2,…}(3).对于网络化切换系统(11),给定标量m,σ∈(0,1),δi∈(1,+∞),νi∈(0,+∞),κi∈(0,+∞),



|
(28) |
|
(29) |
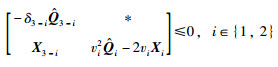
|
(30) |
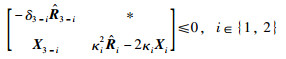
|
(31) |
|
(32) |
|
(33) |
|
(34) |
其中,








则系统(11)在记忆型事件触发机制(7)和反馈控制增益序列Kj=Yj-1X1,j∈{0,1,…,m-1}的控制作用下,可以抵御周期性PWM型DoS攻击(3)并实现指数稳定,其中,事件触发比较矩阵
证明 首先,定义Xi=Pi-1,当式(13)中i=1时,使其同时左乘和右乘对角矩阵diag{X1,X1,…,X1,R1-1},当式(13)中i=2时,使其同时左乘和右乘对角矩阵diag{X2,X2,X2,R2-1},接下来,定义一系列新变量,



本文借鉴文[23]建立的卫星控制系统模型来验证所提出理论方法的有效性,系统模型中各参数变量定义如下所示:
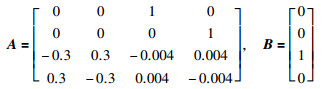
|
由于该系统存在虚轴上的特征值,故无控制器作用下,其是不稳定的,本文在此基础上,考虑其遭受周期性PWM型DoS攻击并采用本文提出的理论方法为其设计记忆型缓存器和记忆型反馈控制器,在节约通讯和计算资源的同时使其可以主动防御一定程度的网络攻击.
首先,考查系统在遭受不同周期DoS攻击下的鲁棒性.预先设定缓存器大小m=3,加权系数μ0=0.7,μ1=0.2,μ2=0.1,事件触发器参数σ=0.3,系统采样周期h=0.06 s,δi=1.05,α1=0.16,α2=0.5,νi=κi=
|
系统初始状态为x0=[1 0.5 0.3 0.2]T.
第一种情况:假设所遭受的DoS攻击周期T=2 s,最小休眠时间Tmin=0.8 s,每个周期内攻击者休眠时间Toff为[0.8,2]内任一随机数,在Matlab中进行仿真,进行100次重复实验,取仿真前30 s内系统对应状态的平均值,绘制系统状态响应曲线图 2.

|
| 图 2 T=2 s,Tmin=0.8 s时系统状态响应 Fig.2 System response with T=2 s, Tmin=0.8 s |
第二种情况:假设所遭受的DoS攻击周期T=3 s,最小休眠时间Tmin=0.8 s,每个周期内攻击者休眠时间Toff为[0.8,3]内任一随机数,同样,在Matlab中进行仿真,进行100次重复实验,取仿真前30 s内系统对应状态的平均值,绘制系统状态响应曲线图 3.

|
| 图 3 T=3 s,Tmin=0.8 s时系统状态响应 Fig.3 System response with T=3 s, Tmin=0.8 s |
由图 2可知,系统在控制器的作用下在15 s左右逐渐趋于稳定,动态过程较为平滑,表示系统可以成功抵御DoS攻击带来的不良影响,经统计,前30 s共有平均约135个状态信息被触发,相比于周期为0.06 s的时间驱动机制节省了大量通讯资源.
相比于图 2、图 3系统动态过程波动较大且调节时间明显延长,这是由于更加严重的DoS攻击所导致,经统计,前30 s平均共有约204个状态信息被触发.
为方便阐述,不妨定义变量
通过上面两种仿真结果可以看出,本文所提出的方法可以使得系统抵御不同周期的DoS攻击,但情形严重的攻击会使系统调节时间延长且动态过程波动变大.
然后,为考查记忆型事件触发方案对改善系统控制性能的效果,本文又选取另外一组触发器的权重系数μ0=μ1=μ2= 

|
图 4 两组参数下 |
本文分析了常见网络控制系统遭受部分信息已知的周期性PWM型DoS攻击的情形,通过在传感器和控制器端装置缓存器的方式,设计了新型的记忆型事件触发机制,并且通过构造分段李雅普诺夫泛函的方法,分析了控制系统的指数稳定性,利用线性矩阵不等式技术,给出了事件触发参数、反馈控制器和DoS攻击关键参数的协同设计方法,使得系统可以主动防御一定程度的网络攻击.最后,本文通过实际控制系统模型的仿真案例,验证了本文所提出理论方法的有效性.
本文未来的研究方向是将提出的理论方法扩展到遭受非周期型DoS攻击的网络化控制系统的主动安全防御策略中.另一方面,本文也将会考虑具体的网络控制系统实例,例如:多智能体系统、智能电网等,进一步研究所提理论方法的有效性.
| [1] | Borgers D P, Heemels W P M H. Event-separation properties of event-triggered control systems[J]. IEEE Transactions on Automatic Control, 2014, 59(10): 2644–2656. DOI:10.1109/TAC.2014.2325272 |
| [2] | Mazo M, Tabuada P. Decentralized event-triggered control over wireless sensor/actuator networks[J]. IEEE Transactions on Automatic Control, 2011, 56(10): 2456–2461. DOI:10.1109/TAC.2011.2164036 |
| [3] | Dimarogonas D V, Frazzoli E, Johansson K H. Distributed event-triggered control for multi-agent systems[J]. IEEE Transactions on Automatic Control, 2012, 57(5): 1291–1297. DOI:10.1109/TAC.2011.2174666 |
| [4] | Mazo M, Anta A, Tabuada P. An ISS self-triggered implementation of linear controllers[J]. Automatica, 2010, 46(8): 1310–1314. DOI:10.1016/j.automatica.2010.05.009 |
| [5] | Heemels W P M H, Donkers M C F. Model-based periodic event-triggered control for linear systems[J]. Automatica, 2013, 49(3): 698–711. DOI:10.1016/j.automatica.2012.11.025 |
| [6] | Heemels W P M H, Donkers M C F, Teel A R. Periodic event-triggered control for linear systems[J]. IEEE Transactions on Automatic Control, 2013, 58(4): 847–861. DOI:10.1109/TAC.2012.2220443 |
| [7] | Yue D, Tian E, Han Q L. A delay system method for designing event-triggered controllers of networked control systems[J]. IEEE Transactions on Automatic Control, 2013, 58(2): 475–481. DOI:10.1109/TAC.2012.2206694 |
| [8] | Tian E, Wang Z, Zou L, et al. Probabilistic-constrained filtering for a class of nonlinear systems with improved static event-triggered communication[J]. International Journal of Robust and Nonlinear Control, 2018. |
| [9] | Peng C, Yang M, Zhang J. Network-based H-infinity control for T-S fuzzy systems with an adaptive event-triggeredcommunication scheme[J]. Fuzzy Sets and Systems, 2017, 329: 61–76. DOI:10.1016/j.fss.2016.12.011 |
| [10] | Peng C, Zhang J, Han Q L. Consensus of multiagent systems with nonlinear dynamics using an integrated sampled-data-based event-triggered communication scheme[J]. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2018, 49(3): 589–599. |
| [11] | Peng C, Zhang J, Yan H. Adaptive event-triggering H-infinity load frequency control for network-based power systems[J]. IEEE Transactions on Industrial Electronics, 2018, 65(2): 1685–1694. DOI:10.1109/TIE.2017.2726965 |
| [12] | Hu S, Yue D, Xie X, et al. Stabilization of neural-network-based control systems via event-triggered control withnonperiodic sampled data[J]. IEEE Transactions on Neural Networks&Learning Systems, 2018, 29(3): 573–585. |
| [13] | Foroush H S, Martínez S. On single-input controllable linear systems under periodic dos jamming attacks[J]. Mathematics, 2012. |
| [14] | Foroush H S, Martínez S. On event-triggered control of linear systems under periodic denial-of-service jamming attacks[C]//IEEE Conference on Decision&Control. Piscataway, NJ, USA: IEEE, 2012. |
| [15] | Hu S L, Yue D, Xie X P, et al. Resilient event-triggered controller synthesis of networked control systems under periodic DoS Jamming attacks[J]. IEEE Transactions on Cybernetics, 2018. DOI:10.1109/TCYB.2018.2861834 |
| [16] | 沈烨平. DoS攻击下网络控制系统的稳定分析与控制器设计[C]//中国自动化大会(CAC2017)暨国际智能制造创新大会CIMIC2017). 2017. |
| [17] |
杨飞生, 汪璟, 潘泉, 等.
网络攻击下信息物理融合电力系统的弹性事件触发控制[J]. 自动化学报, 2019, 45(1): 110–119.
Yang F S, Wang J, Pan Q, et al. Resilient event-triggered control of grid cyber-physical systems against cyber attack[J]. Acta Automatica Sinica, 2019, 45(1): 110–119. |
| [18] | De Persis C, Tesi P. Resilient control under denial-of-service[J]. IFAC Proceedings Volumes, 2013, 47(3): 134–139. |
| [19] | Zhi F, Hu G. Secure cooperative event-triggered control of linear multiagent systems under DoS attacks[J]. IEEE Transactions on Control System Technology, 2019. DOI:10.1109/TCST.2019.2892032 |
| [20] | Cetinkaya A, Ishii H, Hayakawa T. Event-triggered control over unreliable networks subject to jamming attacks[C]//Proceedings of the 54th IEEE Conference on Decision and Control. Piscataway, NJ, USA: IEEE, 2015. |
| [21] | Hu S, Gu Y, Chen X, et al. Observer-based event-triggered control for cyber-physical systems under unknown periodic DoS jamming attacks[C]//30th Chinese Control and Decision Conference. Piscataway, NJ, USA: IEEE, 2018: 1422-1427. |
| [22] | Park P, Ko J, Jeong C. Reciprocally convex approach to stability of systems with time-varying delays[J]. Automatica, 2011, 47(1): 235–238. DOI:10.1016/j.automatica.2010.10.014 |
| [23] | Zhang X M, Han Q L. Event-triggered dynamic output feedback control for networked control systems[J]. IET Control Theory&Applications, 2014, 8(4): 226–234. |