



0 引言
故障诊断技术是一门紧密结合生产实际的工程科学,是现代化生产发展的产物.故障诊断技术就是在设备运行中或基本不拆卸设备的情况下,掌握设备的运行状况,根据对被诊断对象测试所取得的有用信息进行分析处理,判断被诊断对象的状态是否处于异常状态或故障状态.信息融合技术是协同利用多源信息,以获得对事物或目标更客观、更本质认识的信息综合处理技术,已应用在人工智能、结构损伤识别、故障诊断等领域[1-6],是智能科学研究的关键技术之一.在诸多的信息融合模型和方法中,Dempster-Shafer(D-S)证据理论算法[7-8]是最为有效的算法之一.
发动机故障诊断是一种典型的多传感器信息融合问题.它使用由振动,声音,压力和温度等多个或多类传感器获得的信息来检测和识别发动机故障.其中,信息融合在应用与故障诊断时,需要对传感器收集到的数据进行处理优化,以提高传感器信息数据的精确性和可靠性.同时,证据理论在处理不确定性信息方面有着较大的优势[9],因而近些年来证据理论被广泛应用于信息融合当中[10-14].从证据理论的角度来看,从每个传感器获得的信息可以看作一条证据,基于多传感器信息的发动机故障诊断即是一个证据融合问题.
信息融合在应用于故障诊断时,需要围绕两个主要问题进行展开:如何整合可能是冗余的多个传感器信息来获取关于潜在故障的精确证据线索;如何基于多传感器数据做出决策,这些数据可能是不精确的.针对这两方面的问题,本文对已提出的证据理论多源信息融合故障诊断方法做出了两方面的改进与优化.
一方面是对特征值样本即训练集处理方法的优化.在测量特征值样本的过程中,由于仪器误差、人为误差和外界条件影响等原因,不可避免地会发生测量误差,如何更精确地由多组样本求得各状态下的各个特征值,对故障诊断系统显得尤为重要.本文采用幂均算子的方法对特征值样本进行处理,提高了整个故障诊断系统的精确性.
另一方面是对证据结构进行优化.基于证据理论进行不确定性表示和推理时,如何有效地生成基本概率分配函数(basic probability assignment,BPA)仍是一个开放性的问题.众多学者对该问题进行研究,邓勇等[15]利用回转半径得到相似度以生成BPA;康兵义等[16]基于区间理论的方法生成BPA;韩德强等[17]基于多属性的不确定性区间生成BPA;邓鑫洋等[18]面向决策问题设计提出了基于信度马尔可夫模型的BPA生成方法;孙维超等[19]利用粗糙集将信息源给出的诊断数据转化为BPA,并将结果进行融合和故障诊断;李少波等[20]基于云模型方法生成BPA,通过证据理论组合规则将各个证据进行融合,并在融合决策条件下得出故障诊断结果.在证据理论的实际运用过程中,BPA的生成往往与具体应用密切相关.本文在发动机故障诊断时,通过量化待测特征值和故障原型之间的距离生成BPA.本文方法在生成BPA时,不仅用幂均算子的方法对特征值样本进行处理以提高数据的精确性,还考虑了多元素子集的信度生成,能够更有效地表示和融合不确定性信息,提高了故障诊断的可靠性.
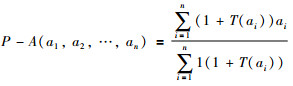
1 幂均算子在信息融合时,需要通过融合一组值来获取一个融合后的结果.在对信号样本进行数据处理时,Yager[21]引入幂均算子的方法进行融合.该算子在考虑到待融合数据之间的相互关系的基础上,定义了一个支持度函数表示原始数据之间相互支持程度,因此它在融合时具有一些显著的优点,并且使得该算子可以广泛用于许多应用系统[22-24].在融合过程中,对某一原始数据而言,其它数据对其支持度可以作为它的融合权重.
1.1 幂均算子定义定义1 假设(a1,a2,…,an)是一组待融合数据,幂均算子定义如下:
|
(1) |
其中,
|
(2) |
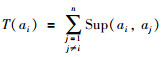
Sup(ai,aj)表示aj对ai的支持度,T(ai)表示除了ai本身,其他所有值对ai的支持度.这里给出一种支持度的函数:

|
(3) |
其中,K∈[0, 1]且α>0,可以看出这个函数是对称的,并且其值域在单位区间内.在本文中,取K=1,α=1.
幂均算子是ai的非线性加权平均值,它可以考虑这些值之间的相互关系,并且该算子具有对称性,数据的顺序对最终结果没有影响.这里,如果支持函数等于0,则幂均算子退化为简单平均值.
1.2 特征样本融合算例由同一传感器采集到描述某发动机两个特征X、Y的5组特征值样本点,将其用数对(X,Y)表示为:(302,1936),(202,1532),(305,1942),(301,2054),(323,1840),将这5组特征值样本点采用平均融合得到其平均值为(286.6,1860.8),采用幂均算子融合得到结果为(299.9,1904.3),融合结果如图 1所示.可知,在用简单平均对样本点进行处理时,测量误差较大的样本特征值(202,1532)对结果有较大影响;而采用幂均算子时,测量误差较大的样本影响减弱,融合结果更加合理.可以看出,采用幂均算子能够较好地减小具有较大测量误差的样本点对融合结果的影响.

|
| 图 1 采用平均数和幂均算子融合特征值样本点示意图 Fig.1 Schematic diagram of eigenvalue sample points using mean and power average operators |
证据推理理论,由Dempster引入并在之后由Shafer扩展完善,涉及命题的信度和命题的系统结构.概念上命题的可信度与命题为真的可能性是不一样的.在形成命题时,可以用相似的方式理解证据.证据理论涉及证据,证据权重和证据可信度.证据理论中的信度结构对应于经典的概率模型.因此,这个理论可以被看作是经典概率论的一个推广化.
2.1 确定辨识框架考虑到设备的N种故障模式可以构造如下识别框架:

|
(4) |
其中,X0代表没有故障发生,X1,X2,…,Xn代表该故障的存在,可以构造Θ的幂集如下:

|
(5) |
多元素子集表示不确定多个命题中的哪个命题发生,例如{X0,X1}被视为一个不确定的状态,它不确定发动机是处于无故障状态X0还是故障模式X1. Xj是一个描述第j种故障(引擎状态)的特征向量,其表达方式为

|
(6) |
其中,xji是第j种故障的第i种特征,i=1,2,…,n,j=1,2,…,n.这里我们用H1表示{X0},即对于{X0},{X1}…,{XN},其表示方法为H1,…,HN+1. N+1个特征向量可以由样本量测得,它们也是辨识框架的幂集中单子集的特征向量.由于多元素子集表示根据所给出的数据无法确定发动机的状态,所以这里我们通过多元素子集各元素的平均特征值来构造多元素子集的特征值.例如,HN+2的特征向量为

|
(7) |
其中,

|
(8) |
对于待诊断的发动机,由传感器实际测量的各特征值可以由一个诊断矢量表示:

|
(9) |
其中,用Sk表示从第k种传感器获得的测量向量:

|
(10) |
ski表示Sk的第i个元素,i=1,2,…,mk,其中mk是第k个传感器获得的元素个数,且∑mk=n.
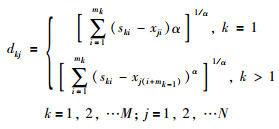
2.2 生成基本概率分配函数根据测量得到设备的数据,与特征值进行相似度对比,得到基本概率分配函数.直观来说,就某k传感器而言,Sk与Xj越相似,发生第j个故障的可能性越大.相对地,Sk与Xj相似度越低,第j个故障的可能性越小.使用Minkowski距离[25]来度量测量特征值和故障原型之间的距离,其距离定义如下:
|
(11) |
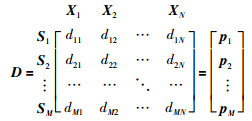
其中,dkj表示Sk与Xj的距离,α为一个恒定的常参数.如果α=2,该距离收敛为欧氏距离.所有传感器测量值与所有故障原型之间的距离可以以矩阵形式表示为
|
(12) |
矩阵D中的每一行表示从一个传感器获得的测量值与所有故障原型之间的距离;D的每一列是一个故障原型到所有传感器测量值的距离,根据从第k个传感器获得的信息,距离dkj越小,第j个故障就越有可能发生.将pkj定义为

|
(13) |
归一化后以矩阵形式表示,我们可以得到基本概率分配矩阵:
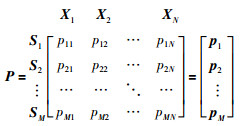
|
(14) |

|
(15) |
矩阵P中的每一行可以看作是从一个传感器得到的对于故障集合(N个故障)的BPA.例如,对于第k个传感器得到的故障集合的BPA,可以用向量的形式表示:

|
(16) |
其中,pkN是第k个传感器对于故障N的置信度,k=1,2,…,M.按照传感器的不同,可以将基本概率分配矩阵P分为M组BPA.
2.3 证据融合和决策分析一旦获得由各传感器得到的BPA,最终的融合结果可以由证据理论的融合规则得到.对多组BPA,使用D-S证据理论进行信息融合,其融合规则为:对于辨识框架Θ下的一组概率分配函数m1,m2,…,mn而言,该融合公式为
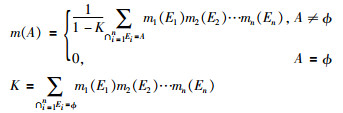
|
(17) |
其中,Ei为辨识框架中的第i个子集;K为冲突系数,其值越大,表示证据间冲突越大.
使用Pignistic probability[26]方法将融合得到的m转换为概率分布P,所述转换方法为
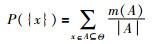
|
(18) |
其中,x为辨识框架中的元素.该方法的实质是将一个BPA函数转化为概率分布,也就是说,在证据融合后,将m中的多元素子集的置信度均分给单子集.转化后的概率分布即为最终的融合结果.若P({x})中最大概率大于0.5,则取P({x})中最大的概率对应的类别作为设备故障诊断结果(否则认为无法做出诊断).
2.4 性能评估分析在证据理论中,一条证据可以代表一种信度结构,且信度结构反应了辨识框架中所包含的信息,例如:m(Θ)=1表示没有来自相应证据的信息;m(Xi)=1表示Θ中Xi发生的概率为1,反应了Xi的必然存在性.
这里要解决的问题是一个信度结构可以提供多少关于辨识框架的信息,或者说如何度量融合后的证据表现.在此,使用Yager[27]提出的一种度量值.该度量值被称为证据信息量,用来量化证据中的信息量,定义为

|
(19) |
其中似然函数Pls定义为
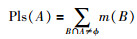
|
(20) |
Im表示辨识框架Θ中来自基本概率分配函数m的证据信息量,可以衡量证据组合的有效性. Im越接近1,该证据就越有利于决策.因此,我们可以用Im量化融合后证据中的信息量,从而反映多传感器信息融合方案的性能.
3 案例分析在该案例中,我们考虑发动机的三种状态:“无故障:X0”,“排气阀故障:X1”和“活塞环故障:X2”.使用3个传感器采集数据:两个加速度传感器和一个声学传感器.一个加速度传感器安装在靠近出气阀的气缸盖上,标记为S1;另一个加速度传感器安装在进气阀附近的气缸盖上,标记为S2;声学传感器位于气缸盖正上方,标记为S3.对于加速度信号,我们计算它们在时域中的峰峰值(P-to-P)和最大频谱的频率(Fmax).对于声信号,我们计算平均压力水平(MPL)和频谱的中心频率(Fc). 表 1到表 3列出了在不同的状态下从两个传感器测量的九组特征值样本的特征值.
| S1 | S2 | S3 | |||
| P-to-P | Fmax | P-to-P | Fmax | MPL | Fc |
| 382 | 545.9 | 363 | 562.5 | 152.897 1 | 769.157 9 |
| 303 | 545.9 | 376 | 562.5 | 152.906 3 | 763.428 8 |
| 317 | 565.4 | 362 | 547.2 | 152.902 3 | 763.295 6 |
| 294 | 565.4 | 389 | 562.5 | 152.877 2 | 759.247 8 |
| 317 | 565.4 | 372 | 562.5 | 152.789 6 | 766.278 6 |
| 330 | 565.4 | 388 | 562.5 | 152.887 6 | 760.673 4 |
| 297 | 565.4 | 381 | 562.5 | 152.923 5 | 761.137 5 |
| 266 | 565.4 | 386 | 547.2 | 152.895 4 | 768.912 4 |
| 294 | 565.4 | 390 | 547.2 | 152.912 3 | 754.682 6 |
| S1 | S2 | S3 | |||
| P-to-P | Fmax | P-to-P | Fmax | MPL | Fc |
| 2042 | 544.9 | 1702 | 597.9 | 152.842 2 | 821.609 3 |
| 1918 | 544.9 | 1775 | 597.9 | 150.976 7 | 788.993 5 |
| 1942 | 544.9 | 1684 | 597.9 | 152.902 2 | 806.101 3 |
| 2054 | 544.9 | 1801 | 597.9 | 152.548 7 | 811.567 2 |
| 1840 | 563.5 | 1720 | 592.0 | 151.278 5 | 827.247 6 |
| 1925 | 544.9 | 1695 | 597.9 | 153.153 8 | 807.872 3 |
| 1633 | 564.5 | 1853 | 597.9 | 150.875 9 | 816.853 8 |
| 1645 | 564.5 | 1630 | 597.9 | 154.745 9 | 798.256 |
| 1715 | 544.9 | 1750 | 597.9 | 153.234 9 | 800.162 7 |
| S1 | S2 | S3 | |||
| P-to-P | Fmax | P-to-P | Fmax | MPL | Fc |
| 2510 | 546.9 | 2582 | 538.7 | 152.799 7 | 724.800 2 |
| 2590 | 546.9 | 2620 | 538.7 | 152.830 6 | 720.286 7 |
| 2692 | 546.9 | 2479 | 538.7 | 152.821 9 | 727.963 5 |
| 2925 | 546.9 | 2555 | 538.7 | 152.789 0 | 722.298 6 |
| 2638 | 546.9 | 2681 | 538.7 | 152.562 9 | 726.128 6 |
| 2576 | 545.9 | 2532 | 538.7 | 152.233 5 | 721.768 9 |
| 2670 | 545.9 | 2673 | 538.7 | 151.982 1 | 723.233 5 |
| 2654 | 545.9 | 2477 | 521.2 | 153.021 3 | 720.677 5 |
| 2787 | 546.9 | 2508 | 521.2 | 152.798 7 | 731.674 9 |
使用幂均算子的方法对特征值进行处理,发动机的特征值矩阵如下:
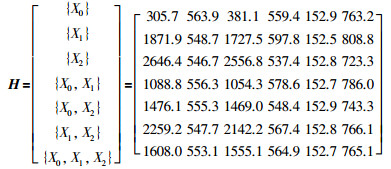
|
现有某发生活塞环故障X2的待诊断发动机,采样的两个加速度传感器S1、S2均工作正常,由于环境噪声的影响,声学传感器S3的测量值误差较大.通过3个传感器测得的特征值为
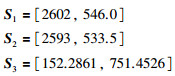
|
通过Minkowski距离公式(α=2)计算得到距离矩阵后,我们可以得到基本概率分配矩阵如下:

|
由3个传感器,我们可以得到3组BPA:

|
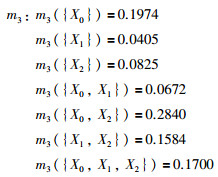
|
通过证据理论的融合公式将其融合可以得到融合结果m:
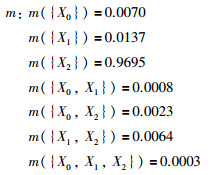
|
使用Pignistic probability方法将融合得到的m转换为概率分布P,具体方法为
|
依据得到的概率分布P对设备故障做出诊断,概率分布P中最大概率为P({X2})且P({X2})>0.5,故设备故障被诊断为X2,与真实故障类型一致.
对上述所用方法得到的融合结果m进行性能评估,其证据信息量为

|
对于相同的案例,分别采用文[20]方法、平均值方法对特征数据进行处理以生成BPA,用证据理论融合规则进行融合,并对融合结果进行性能评估,最后与本文方法进行比较,对比结果如表 4所示.
| 融合结果 | 文[20]方法 | 平均值方法 | 本文方法 |
| m(X0) | 0.002 7 | 0.010 3 | 0.007 0 |
| m(X1) | 0.053 7 | 0.038 8 | 0.013 7 |
| m(X2) | 0.930 5 | 0.912 9 | 0.969 5 |
| m(X0,X1) | 0.000 0 | 0.002 8 | 0.000 8 |
| m(X0,X2) | 0.000 0 | 0.002 3 | 0.002 3 |
| m(X1,X2) | 0.000 0 | 0.031 6 | 0.006 4 |
| m(X1,X2,X3) | 0.013 1 | 0.001 3 | 0.000 3 |
| Im | 0.809 9 | 0.825 7 | 0.899 7 |
从融合结果可以看出,故障X2的置信度在本文所用的方法中值为0.969 5,要高于文[20]的方法(X2的置信度为0.930 5)和平均值方法(X2的置信度为0.912 9),且本文方法得出的融合结果的证据信息量也均大于其它方法得出的融合结果的证据信息量.值得注意的是,虽然X2的置信度在文[20]方法的融合结果中大于平均值方法,但文[20]方法在生成多元素子集时只考虑了全集,导致文[20]方法融合结果的证据信息量小于平均值方法的证据信息量.说明本文方法一方面在处理样本数据时引入幂均算子,其结果精确性更高;另一方面在生成BPA时考虑了所有多元素子集的生成,其结果可靠性更高,诊断效果更好.
4 总结多源信息融合基于各个信源分别观测得到的信息,通过对信息的优化组合得到更多的有效信息,最终利用多个信源协同工作来提高整个系统的有效性.本文主要介绍了对已提出的证据理论多传感器信息融合故障诊断方法做出的两方面改进与优化:一方面采用幂均算子的方法对特征值样本进行处理,以提高整个故障诊断系统的准确性;另一方面,通过量化待测特征值和故障原型之间的距离生成基本概率分配函数,并考虑了多元素子集的信度生成,能够更有效地表示和融合不确定性信息.通过发动机故障案例分析,发现该方法不仅能正确诊断出故障状态,而且诊断结果可靠性更高.
| [1] | De La Iglesia D H, Villarrubia G, De Paz J F, et al. Multi-sensor information fusion for optimizing electric bicycle routes using a swarm intelligence algorithm[J]. Sensors, 2017, 17(11): 2501. DOI:10.3390/s17112501 |
| [2] |
陈安华, 蒋玲莉, 刘义伦, 等.
基于知识网格的故障诊断专家系统模型[J]. 仪器仪表学报, 2009, 30(11): 2450–2454.
Chen A H, Jiang L L, Liu Y L, et al. Fault diagnosis expert system model based on knowledge grid[J]. Chinese Journal of Scientific Instrument, 2009, 30(11): 2450–2454. DOI:10.3321/j.issn:0254-3087.2009.11.037 |
| [3] | Chou J S, Pham A D. Nature-inspired metaheuristic optimization in least squares support vector regression for obtaining bridge scour information[J]. Information Sciences, 2017, 399: 64–80. DOI:10.1016/j.ins.2017.02.051 |
| [4] |
廖平, 郑友娟, 覃才珑.
基于改进证据理论的全信息故障诊断[J]. 计算机工程, 2016, 42(3): 308–311.
Liao P, Zheng Y J, Yan C W. Full information fault diagnosis based on improved evidence theory[J]. Computer Engineering, 2016, 42(3): 308–311. DOI:10.3969/j.issn.1000-3428.2016.03.055 |
| [5] |
张维华, 郭伟震, 周莉.
改进证据融合次序的目标识别算法[J]. 信息与控制, 2018, 47(5): 621–640.
Zhang W H, Guo W Z, Zhou L. Target recognition algorithm for improving evidence fusion order[J]. Information and Control, 2018, 47(5): 621–640. |
| [6] | Jiang W, Wei B, Xie C, et al. An evidential sensor fusion method in fault diagnosis[J]. Advances in Mechanical Engineering, 2016, 8(3): 1–7. |
| [7] | Dempster A P. Upper and lower probabilities induced by a multivalued mapping[J]. Annals of Mathematical Statistics, 1967, 38(2): 325–339. |
| [8] | Shafer G. A mathematical theory of evidence[M]. Princeton: Princeton University Press, 1976. |
| [9] |
段新生.
证据理论与决策、人工智能[M]. 北京: 中国人民大学出版社, 1993: 114-124.
Duan X S. Evidence theory and decision making, artificial intelligence[M]. Beijing: China Renmin University Press, 1993: 114-124. |
| [10] | Deng X, Han D, Dezert J, et al. Evidence combination from an evolutionary game theory perspective[J]. IEEE Transactions on Cybernetics, 2016, 46(9): 2070–2082. DOI:10.1109/TCYB.2015.2462352 |
| [11] |
夏飞, 孟娟, 杨平, 等.
改进D-S证据理论在振动故障诊断中的应用[J]. 电子测量与仪器学报, 2018, 32(7): 171–179.
Xia F, Meng J, Yang P, et al. Application of improved D-S evidence theory in vibration fault diagnosis[J]. Journal of Electronic Measurement and Instrument, 2018, 32(7): 171–179. |
| [12] |
朱胜男, 周树民, 王传美, 等.
基于改进的D-S证据理论的网络舆情信息融合[J]. 武汉理工大学学报, 2014, 36(07): 139–144.
Zhu S N, Zhou S M, Wang C M, et al. Network information fusion based on improved d-s evidence theory[J]. Journal of Wuhan University of Technology, 2014, 36(07): 139–144. |
| [13] |
徐晓滨, 郑进, 徐冬玲, 等.
基于证据推理规则的信息融合故障诊断方法[J]. 控制理论与应用, 2015, 32(9): 1170–1182.
Xu X B, Zheng J, Xu D L, et al. A fault diagnosis method for information fusion based on evidence reasoning rules[J]. Control Theory & Applications, 2015, 32(9): 1170–1182. |
| [14] | Lu F, Jiang C, Huang J, et al. A novel data hierarchical fusion method for gas turbine engine performance fault diagnosis[J]. Energies, 2016, 9(10): 828. DOI:10.3390/en9100828 |
| [15] | Deng Y, Jiang W, Xu X, et al. Determining BPA under uncertainty environments and its application in data fusion[J]. Journal of Electronics (China), 2009, 26(1): 13–17. DOI:10.1007/s11767-008-0121-9 |
| [16] |
康兵义, 李娅, 邓勇, 等.
基于区间数的基本概率指派生成方法及应用[J]. 电子学报, 2012, 40(6): 1092–1096.
Kang B Y, Li Y, Deng Y, et al. Determination of basic probability assignment based on interval numbers and its application[J]. Acta Electronica Sinica, 2012, 40(6): 1092–1096. DOI:10.3969/j.issn.0372-2112.2012.06.004 |
| [17] | Han D, Dezert J, Tacnet J M, et al. A fuzzy-cautious OWA approach with evidential reasoning[C]//IEEE 2012 15th International Conference on Information Fusion (FUSION), 2012: 278-285. https://www.researchgate.net/publication/257207785_A_Fuzzy-Cautious_OWA_Approach_with_Evidential_Reasoning |
| [18] |
邓鑫洋, 邓勇, 章雅娟, 等.
一种信度马尔科夫模型及应用[J]. 自动化学报, 2012, 38(4): 666–672.
Deng X Y, Deng Y, Zhang Y J, et al. A belief Markov model and its application[J]. Acta Automatica Sinica, 2012, 38(4): 666–672. |
| [19] |
孙伟超, 李文海, 李文峰.
融合粗糙集与D-S证据理论的航空装备故障诊断[J]. 北京航空航天大学学报, 2015, 41(10): 1902–1909.
Sun W C, Li W H, Li W F. Analysis of aviation equipment fault diagnosis based on rough set and D-S evidence theory[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(10): 1902–1909. |
| [20] |
李少波, 陈永前.
基于云模型与证据理论的故障诊断方法[J]. 组合机床与自动化加工技术, 2017(4): 99–102.
Li S B, Chen Y Q. Fault diagnosis method based on cloud model and evidence theory[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2017(4): 99–102. |
| [21] | Yager R R. The power average operator[J]. IEEE Transactions on, Systems Man & Cybernetics, Part A:Systems & Humans, 2001, 31(6): 724–731. |
| [22] | Xu Z, Yager R R. Power-geometric operators and their use in group decision making[J]. IEEE Transactions on Fuzzy Systems, 2010, 18(1): 94–105. DOI:10.1109/TFUZZ.2009.2036907 |
| [23] | Zhang Z. Hesitant fuzzy power aggregation operators and their application to multiple attribute group decision making[J]. Information Sciences, 2013, 234(10): 150–181. |
| [24] | Jiang W, Wei B, Zhan J, et al. A visibility graph power averaging aggregation operator:A methodology based on network analysis[J]. Computers & Industrial Engineering, 2016, 101: 260–268. |
| [25] | Bishop C M. Neural networks for pattern recognition[M]. Oxford, UK: Oxford University Press, 1995. |
| [26] | Smets P. Decision making in the TBM:the necessity of the pignistic transformation[J]. International Journal of Approximate Reasoning, 2005, 38(2): 133–148. DOI:10.1016/j.ijar.2004.05.003 |
| [27] | Yager R R. Entropy and specificity in a mathematical theory of evidence[J]. International Journal of General System, 1983, 9(4): 249–260. DOI:10.1080/03081078308960825 |