



2. 中国科学院机器人与智能制造创新研究院, 辽宁 沈阳 110169;
3. 中国科学院光电信息处理重点实验室, 辽宁 沈阳 110016;
4. 中国科学院大学, 北京 100049
2. Institutes for Robotics and Intelligent Manufacturing, Chinese Academy of Sciences, Shenyang 110169, China;
3. Key Laboratory of Opto-Electronic Information Processing CAS, Shenyang 110016, China;
4. University of Chinese Academy of Sciences, Beijing 100049, China
0 引言
在目标探测和跟踪任务中保证成像的清晰、稳定是弹载光电系统一项基本功能,在光电系统中通常通过构建陀螺稳像平台,以角速率稳定的方式实现视轴的惯性稳定.压心是飞行载体气动力作用的等效作用点,由于压心偏离于载体的重心,气流的随机冲击导致载体姿态的随机变化,成为光电系统最主要的扰动来源[1-2].近年来弹载光电系统的技术发展趋势对稳像性能提出了更高的要求.一方面,随着飞行速度的提高,高速气流对飞行载体的冲击更为剧烈;另一方面,光电载荷的小型化和轻量化使得平台负载的转动惯量减小,控制回路的力矩刚度降低[3-5],导致系统的扰动抑制性能下降.受限于平台结构固有频率以及传感器的有效信号带宽,通过提高陀螺稳定回路响应带宽进而提升稳像性能的传统方法已无法满足应用需求,因此研究新的稳像控制方法,提高稳像平台的扰动抑制能力,具有重要意义.
相关学者对光电系统的扰动影响机理进行了研究,并指出系统的内在因素,如负载相对于平台回转中心的质量不平衡、转轴摩擦、线缆弹性等决定了载体扰动传递至视轴的形式[6-8].文[9-12]针对特定的转轴摩擦和线缆弹性因素,对其物理特性进行数学建模并实施补偿控制,相比PI控制方法,有效改善了视轴稳定精度.伺服扰动观测器方法在光电系统中的应用研究也取得了一定进展[13-14],该方法的优点是无需准确获知扰动传递的动力学模型,实施简单,但方法中引入了控制对象的标称逆模型会造成测速信号噪声的放大,并且低通滤波器设计难以兼顾噪声抑制和扰动力矩的估计精度.文[15]提出了一种带有摩擦前馈补偿的扰动观测器补偿控制策略,获得了更好的视轴稳定精度.针对光电系统中的质量不平衡因素,文[16-17]对质量不平衡力矩进行标定和补偿,但补偿方法中未考虑平台框架间的运动耦合及测角和测速传感器信号噪声的影响.
对于载体扰动加速度较大的情形,质量不平衡对稳像精度的影响不可忽略.本文面向直角结构两轴稳像平台,建立了一种包含质量不平衡、转轴摩擦和线缆弹性因素的扰动力矩模型,在不平衡力矩项中考虑了框架间运动耦合的影响.采用基于预测滤波的扰动力矩估计方法解决了力矩信号重构过程中的多传感器噪声影响问题,并通过构建前馈力矩回路对扰动力矩进行自适应补偿.
1 光电稳像平台扰动力矩建模首先,建立了外俯仰、内方位式两轴直角正交结构稳像平台的扰动传递动力学模型;其次,提出了一种用于前馈补偿控制的扰动力矩模型.
1.1 系统动力学模型如图 1所示,在载体上建立惯性坐标系和载体坐标系.首先建立惯性坐标系O′xGyGzG,原点O′位于载体质心,xG、yG、zG分别为弹体倾斜、航向和俯仰运动的惯性基准.建立载体坐标系O′xMyMzM,xM为载体纵轴的前向方向,yM位于弹体纵向平面且垂直于xM向上,zM垂直于xMO′yM平面且其方向与xM、yM成右手定则关系.

|
| 图 1 坐标系定义 Fig.1 Coordinate system definition |
以光电系统环架转轴的回转中心为原点,建立平台基座坐标系OxByBzB、俯仰框架坐标系OxEyEzE和方位框架坐标系OxAyAzA.由载体坐标系O′xMyMzM空间平移至点O形成基座坐标系OxByBzB. OxEyEzE和OxAyAzA分别固联于系统的俯仰框架和方位框架,xA为光电系统的视轴指向.
由坐标系转换关系,可得基座坐标系和俯仰框架坐标系之间的方向余弦矩阵为
|
(1) |
其中,φp为俯仰框架相对于基座的框架角.
俯仰框架坐标系和方位框架坐标系之间的方向余弦矩阵为
|
(2) |
其中,θp为方位框架相对于俯仰框架的框架角.
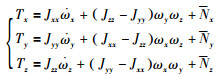
考虑平台为理想刚体,根据动量矩定理,可以得到俯仰或方位框架的欧拉动力学方程:
|
(3) |
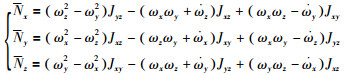
式(3)中,Tx、Ty、Tz为框架3个坐标轴向的作用力矩,Jxx、Jyy、Jzz为3个惯量主轴方向的转动惯量,ωx、ωy、ωz为框架的惯性角速度,Nx、Ny、Nz为非惯量主轴方向质量分布相关的耦合项,其具体形式为
|
(4) |
式(4)中,Jxy、Jxz、Jyz为非惯量主轴方向的转动惯量.
根据光电系统的结构形式,yA为方位框架的驱动轴,zE为俯仰框架的驱动轴.考虑所有作用于驱动轴的外力矩,可得到关系:

|
(5) |
其中,TC为控制力矩,同时也是作用于驱动轴唯一的主动力矩;转轴摩擦力矩TF、线缆恢复力矩TS、质量不平衡力矩TI为系统中的主要扰动力矩;TL为系统中传感器非线性等因素造成的驱动力矩波动.
1.2 扰动力矩模型当稳像平台的驱动元件采用无刷电机时,由于去除了电机电刷复杂的非线性影响,转轴摩擦主要表现为粘滞摩擦特性,系统的阻尼力矩可表示为[18]

|
(6) |
其中,Tdp为转轴摩擦和线缆弹性共同构成的阻尼力矩,α和
由于负载质心偏离平台回转中心,偏心距法向方向的加速度将产生不平衡力矩TI:
|
(7) |
其中,aO为载体姿态扰动在平台回转中心处产生的加速度矢量,设俯仰、方位框架的质量偏心距分别为ρE和ρA,由式(7)可得作用于两框架的不平衡力矩为
|
(8) |
根据运动学关系,得到式(8)中的aOE和aOA为
|
(9) |
式(9)中平台回转中心处的加速度aO可表示为
|
(10) |
式(10)中,lr为载体质心与稳像平台回转中心O之间的距离;ωMy和ωMz分别为载体航向和俯仰方向姿态角速度;

在式(6)的基础上,考虑质量不平衡因素的影响,建立扰动力矩模型:

|
(11) |
将系统中的其它扰动考虑为噪声信号εd.由式(9)可知,方位框架不平衡力矩不仅与方位框架角有关,还与俯仰框架角有关,因此该扰动力矩模型体现了框架间运动耦合的影响.
2 扰动力矩自适应补偿控制方法 2.1 稳定控制回路设计带有电流环的系统稳定控制回路如图 2所示,其中,ωc为转速指令,ωo为负载实际转速.

|
| 图 2 稳定控制回路框图 Fig.2 Framework of stable control loop |
稳定回路主要负责实现给定的速度指令.通过引入校正网络,提高回路带宽后,该回路使系统具有一定的扰动抑制性能.其中,电流校正采用PI控制算法,速度校正采用能够精细规划频率响应的滞后超前控制器.
2.2 无迹卡尔曼滤波扰动力矩估计方法根据式(11)给出的扰动力矩模型进行力矩信号的重构,不仅需要利用平台本身的运动信息,还需引入载体的姿态运动信息,多传感器信号融合后的噪声影响将严重降低扰动力矩的解算精度.此外,由于式中的质量不平衡项存在非线性,因此适合采用非线性预测滤波方法[19-20].无迹卡尔曼滤波(unscented Kalman filter,UKF)可以直接使用非线性模型,从而能够有效降低非线性系统线性化过程产生的高阶项截断误差,因此采用UKF方法对系统中的扰动力矩进行在线估计.
建立系统UKF状态方程和量测方程:
|
(12) |
其中,X为系统状态向量,Z为量测向量,Φ为状态转移矩阵;q和r分别为系统噪声统计矩阵和量测噪声统计矩阵且有cov(qk,qj)=Qk,cov(rk,rj)=Rk.以稳像平台方位框架为例,UKF状态矩阵和量测矩阵为

|
(13) |
且有Φk,k-1=I7.
方位框架扰动力矩与状态变量之间的非线性关系为
|
(14) |
选择UKF的采样策略为比例修正对称采样,并计算Sigma点ξi,k-1:
|
(15) |
其中,n为状态量的维数,λ为修正因数,P为状态量方差.
UKF的状态更新算法:
|
(16) |
其中,Wi为预测权值.
UKF的量测更新算法为
|
(17) |
最后,进行UKF滤波更新,其算法为
|
(18) |
式中,

扰动力矩估计过程可分为两个阶段.在第1阶段,利用控制对象的逆模型对扰动力矩进行间接观测,扰动力矩


对载体姿态扰动下的扰动力矩估计算法效果进行仿真分析.扰动条件设定为幅值为1°、频率为2 Hz的正弦信号.由图 3可见,力矩估计信号有效地抑制了扰动力矩观测噪声,估计信号滞后时间 < 20 ms,对应于2 Hz的扰动频率,其相位滞后 < 4%. 图 4为扰动力矩估计误差曲线.由图 4可知,UKF滤波收敛时间 < 60 ms,滤波收敛后的力矩估计偏差 < 1.53 mN·m.

|
| 图 3 UKF扰动力矩估计结果 Fig.3 Disturbance torque estimate results with UKF |

|
| 图 4 扰动力矩估计误差 Fig.4 Estimate error of disturbance torque |
在双环稳定回路基础上施加前馈控制是伺服系统设计中一种有效的提高抗扰能力的手段,其优点是前馈补偿回路不会影响原稳定回路的频率响应特性.根据扰动力矩估计值,通过逆向设计形成前馈补偿控制量,构建前馈回路(如图 5所示),对系统中的扰动力矩进行自适应补偿. 图 5中,ωi和ωo分别为稳定回路模型的指令和实际转速,GI(s)为电流环等效传递函数;Gc(s)为速度环校正环节,采用PI校正;Gg(s)为速率陀螺传递函数;Cm为电机的力矩系数;J为框架转动惯量;Jn和Cmn为J和Cm的标称值;


|
| 图 5 扰动力矩前馈补偿原理 Fig.5 Principle of disturbance torque feed-forward compensation |
基于某两轴光电系统对控制方法的有效性进行验证.控制系统的构成原理如图 6所示.

|
| 图 6 控制系统构成框图 Fig.6 Framework of control system composition |
系统的驱动元件采用有限转角无刷力矩电机;信号走线采用松散的柔软线缆,使线缆恢复力矩的影响接近线性;速率陀螺采用精度较高的开环光纤陀螺,减小了陀螺信号非线性的影响.系统框架测角元件采用光电角编码器,其测角精度为20″.载体姿态角速度由固联于载体的闭环光纤陀螺敏感后发送给伺服控制处理器,用于UKF计算.在系统基座安装的加速度计,其测量精度 < 6 mg,并使其敏感方向对准载体运动在系统旋转中心处的切线方向,用于获得载体姿态运动在旋转中心处的切向加速度.伺服控制处理器采用TMS320F28335浮点运算DSP.
利用飞行模拟转台进行半实物仿真实验.系统俯仰框架负载质量为3.16 kg,方位框架负载质量为1.65 kg,所选电机的力矩系数为0.207 6 N·m/A.采用测量或离线辨识的方法得到系统俯仰和方位框架的质量偏心距分别为2.4 mm和1.9 mm;俯仰和方位框架的粘滞摩擦系数分别为0.284和0.301;俯仰和方位框架的胡克系数分别为0.053和0.029.
首先验证稳像平台的低速响应性能,在小于等于0.5°/s的6个典型速率点进行测试,并对随动响应的结果做均值统计.测试结果如表 1及图 7、图 8所示,其中ω1和ω2分别为引入前馈补偿控制前后的测试结果.测试主要反映了系统对阻尼力矩影响的抑制能力.实验结果表明,无前馈控制时系统的低速响应精度较低,其中在0.02°/s指令下系统不能克服阻尼力矩的作用,因而不能做出有效响应.引入扰动力矩前馈补偿后,系统在0.02°/s速度指令下仍能做出有效响应,在0.05°/s以上的速度响应精度≥17%,均优于无前馈补偿的情况.
| 指令/(°/s) | 0.02 | 0.05 | 0.1 | 0.2 | 0.5 |
| ω1 | - | 0.023 8 | 0.057 6 | 0.161 | 0.488 |
| ω2 | 0.015 7 | 0.041 5 | 0.096 3 | 0.198 | 0.493 |

|
| 图 7 0.2°/s速度响应 Fig.7 Rate response at 0.2°/s |

|
| 图 8 0.5°/s速度响应 Fig.8 Rate response at 0.5°/s |
验证系统对载体姿态扰动的抑制能力.载体方位通道施加幅值为1.5°、频率为0.5 Hz~4 Hz的正弦扰动,表 2及图 9、图 10给出了采用本文所述方法(σ2)和带有摩擦力矩前馈补偿的扰动观测器控制方法(EDOB,σ1)[11]下的视轴稳定误差均方根值统计结果.从响应曲线可知,UKF滤波算法的收敛时间 < 0.2 s,且由于力矩估计的滞后小,使扰动作用下的视轴运动相比EDOB方法的响应更快.随着扰动频率的增加,两种方法下的稳定精度均呈下降的趋势,但在各扰动频点处,基于EKF力矩估计的前馈方法实现的视轴稳定精度均优于EDOB方法,表 2中用Δ表示了稳定精度提高的百分比.
| 扰动频率 | 0.5 Hz | 1 Hz | 2 Hz | 3 Hz | 4 Hz |
| σ1/mrad | 0.025 7 | 0.032 9 | 0.041 5 | 0.052 0 | 0.059 4 |
| σ2/mrad | 0.022 9 | 0.027 6 | 0.032 4 | 0.038 9 | 0.042 0 |
| Δ /% | 10.9 | 16.1 | 21.9 | 25.2 | 29.3 |

|
| 图 9 2 Hz扰动下的视轴稳定误差 Fig.9 LOS stabilization error with 2 Hz disturbance |

|
| 图 10 4 Hz扰动下的视轴稳定误差 Fig.10 LOS stabilization error with 4 Hz disturbance |
针对一种外俯仰、内方位式光电稳像平台,为使稳像控制采用的扰动力矩模型更为准确,模型包含了质量不平衡力矩项,并且考虑了框架间的运动耦合.采用预测滤波的方法实现了扰动力矩的在线估计,解决了控制算法中来自平台和载体多传感器信号的噪声影响问题.利用飞行模拟转台对基于扰动力矩估计的前馈控制方法进行了半实物实验验证,结果表明无迹卡尔曼滤波该方法的状态估计滞后小、估计过程收敛速度快.引入前馈控制有效地改善了系统的低速响应精度.相比于带有摩擦力矩前馈补偿的扰动观测器控制方法,在0.5 Hz~4 Hz特征频点的载体扰动作用下,视轴稳定精度提高了10.9%~29.3%.所提出方法的性能依赖于扰动模型的精确程度,深入研究模型参数的在线修正方法,将对进一步提高系统的扰动抑制性能具有重要意义.
| [1] |
祁超, 范世珣, 谢馨.
光电稳定平台伺服机构低速及稳定性能控制方法研究[J]. 兵工学报, 2018, 39(10): 1873–1882.
Qi C, Fan S X, Xie X. Research on control method for improving low speed performance and stable precision of electro-optic servo system[J]. Acta Armamentarii, 2018, 39(10): 1873–1882. DOI:10.3969/j.issn.1000-1093.2018.10.001 |
| [2] |
高翔, 刘维亭.
基于光电稳台的扰动分析[J]. 电子设计工程, 2017, 25(2): 76–79.
Gao X, Liu W T. Disturbance analysis based on photoelectric stabilized platform[J]. Electronic Design Engineering, 2017, 25(2): 76–79. |
| [3] |
蒋孝勇, 李锡广, 安永泉.
基于微小型稳定平台的MEMS陀螺信号调理电路设计与测试[J]. 电子器件, 2018, 41(2): 351–355.
Jiang X Y, Li X G, An Y Q. Design and test of MEMS gyro signal conditioning circuit based on micro stable platform[J]. Chinese Journal of Electron Devices, 2018, 41(2): 351–355. DOI:10.3969/j.issn.1005-9490.2018.02.014 |
| [4] |
贾媛, 周向阳.
轻小型惯性稳定平台位置环协同通信控制方法[J]. 测绘科学, 2018, 43(1): 101–106.
Jia Y, Zhou X Y. A cooperative communication and control strategy for the position loop of light-small inertially stabilized platform[J]. Science of Surveying and Mapping, 2018, 43(1): 101–106. |
| [5] |
王琛琛, 王新龙, 黄海.
扰动观测器在惯导平台稳定回路中的应用方法[J]. 鱼雷技术, 2012, 20(3): 194–199.
Wang C C, Wang X L, Huang H. Application of disturbance observer to stabilization loop in inertial platform[J]. Journal of Unmanned Undersea Systems, 2012, 20(3): 194–199. |
| [6] | Masten M K. Inertially stabilized platforms for optical imaging systems[J]. IEEE Control Systems Magazine, 2008, 28(1): 47–64. DOI:10.1109/MCS.2007.910201 |
| [7] |
张宇鹏, 王伟兴.
机载通用高精度稳定平台视轴稳定分析[J]. 国外电子测量技术, 2015, 34(11): 40–44.
Zhang Y P, Wang W X. Analysis on the stability of visual axis of airborne high precision stabilized platform[J]. Foreign Electronic Measurement Technology, 2015, 34(11): 40–44. DOI:10.3969/j.issn.1002-8978.2015.11.009 |
| [8] |
方宇超, 李梦雪, 车英.
车载光电侦察平台视轴稳定技术研究[J]. 光学精密工程, 2018, 26(2): 410–417.
Fang Y C, Li M X, Che Y. Study on boresight stabilized technology of vehicle photoelectric reconnaissance platform[J]. Optics and Precision Engineering, 2018, 26(2): 410–417. |
| [9] | Kennedy P J, Kennedy R L. Direct versus indirect line of sight (LOS) stabilization[J]. IEEE Transactions on Control Systems Technology, 2003, 11(1): 3–15. DOI:10.1109/TCST.2002.806443 |
| [10] |
鲍文亮, 黄显林, 尹航.
光电平台惯性稳定系统的自适应动态摩擦补偿[J]. 电光与控制, 2012, 19(4): 554.
Bao W L, Huang X L, Yin H. Adaptive dynamic friction compensation for an electro-optical platform inertial stabilization system[J]. Electronics Optics & Control, 2012, 19(4): 554. |
| [11] |
晋超琼, 张葆, 李贤涛.
基于扰动观测器的光电稳定平台摩擦补偿策略[J]. 吉林大学学报(工学版), 2017, 47(6): 1877–1884.
Jin C Q, Zhang B, Li X T. Friction compensation strategy of photoelectric stabilized platform based on disturbance observer[J]. Journal of Jilin University (Engineering and Technology Edition), 2017, 47(6): 1877–1884. |
| [12] |
孙高, 朱明超, 贾宏光.
摩擦自适应补偿在导引头稳定平台控制系统中的应用[J]. 红外与激光工程, 2013, 42(5): 1317–1321.
Sun G, Zhu M C, Jia H G. Adaptive friction compensation in seeker stabilized platform servo control system[J]. Infrared and Laser Engineering, 2013, 42(5): 1317–1321. |
| [13] | Khodadadi H, Motlagh M R J, Gorji M. Robust control and modeling a 2-DOF Inertial Stabilized Platform[C]//2011 International Conference on Electrical, Control and Computer Engineering. Piscateway, NJ, USA: IEEE, 2011: 222-227. https://ieeexplore.ieee.org/document/5953880 |
| [14] |
李嘉全, 丁策, 孔德杰.
基于速度信号的扰动观测器及在光电稳定平台的应用[J]. 光学精密工程, 2011, 19(5): 998–1003.
Li J Q, Ding C, Kong D J. Velocity based disturbance observer and its application to photoelectric stabilized platform[J]. Optics and Precision Engineering, 2011, 19(5): 998–1003. |
| [15] |
潘帅, 杨奕, 陈丹丹.
基于干扰补偿的稳定平台控制系统设计[J]. 机械设计与制造, 2018(1): 22–26.
Pan S, Yang Y, Chen D D. The design of inertial stabilization platform based on disturbance compensation[J]. Machinery Design & Manufacture, 2018(1): 22–26. DOI:10.3969/j.issn.1001-3997.2018.01.007 |
| [16] |
房建成, 戚自辉, 钟麦英.
航空遥感用三轴惯性稳定平台不平衡力矩前馈补偿方法[J]. 中国惯性技术学报, 2010, 18(1): 39–43.
Fang J C, Qi Z H, Zhong M Y. Feedforward compensation method for three axes inertially stabilized platform imbalance torque[J]. Journal of Chinese Inertial Technology, 2010, 18(1): 39–43. |
| [17] | Rezac M, Hurak Z. Vibration rejection for inertially stabilized double gimbal platform using acceleration feedforward[C]//Proceedings of the IEEE International Conference on Control Applications. Piscateway, NJ, USA: IEEE, 2011: 362-366. https://ieeexplore.ieee.org/document/6044442 |
| [18] |
杜运理, 夏群利, 祁载康.
导引头隔离度相位滞后对寄生回路稳定性能影响研究[J]. 兵工学报, 2011, 32(1): 28–32.
Du Y L, Xia Q L, Qi Z K. Research on effect of seeker disturbance rejection rate with phase lag on stability of parasitical loop[J]. Acta Armamentarii, 2011, 32(1): 28–32. DOI:10.3969/j.issn.1673-6524.2011.01.008 |
| [19] |
汪秋婷, 戚伟, 肖铎.
基于双Kalman滤波的并联锂电池组循环寿命估计[J]. 信息与控制, 2018, 47(4): 461–467.
Wang Q T, Qi W, Xiao D. Cycle life estimation method for parallel lithium battery pack based on double Kalman filtering algorithm[J]. Information and Control, 2018, 47(4): 461–467. |
| [20] |
王泽华, 梁冬泰, 梁丹.
基于惯性/磁力传感器与单目视觉融合的SLAM方法[J]. 机器人, 2018, 40(6): 933–941.
Wang Z H, Liang D T, Liang D. A SLAM method based on inertial/magnetic sensors and monocular vision fusion[J]. Robot, 2018, 40(6): 933–941. |