



0 引言
近年来随着信息技术的快速发展,网络化系统(Networked Control Systems,NCSs)的控制、滤波及故障诊断问题吸引了广大学者的持续关注[1-3].由于NCSs中存在共享的通讯网络,数据在网络通道传输时不可避免地会出现数据包丢失、时延、乱序等不利现象.针对NCSs这类信息系统与物理过程深度融合的智能系统,其安全性是控制系统分析与设计过程中必须考虑的重要问题.动态系统的故障诊断技术是提高系统可靠性与安全性的重要方法,其中故障检测是故障诊断的关键一环.近些年来,针对非理想网络环境下控制系统的故障检测问题已成为学术界一个研究热点[4-6],其中基于模型的故障诊断方法应用最为广泛[7-8].例如文[9]针对马尔可夫跳变系统的故障检测问题,提出了一种最优故障检测滤波器设计方法,但是该滤波器对系统故障信号的敏感度不够高;文[10-12]主要研究了带有网络时延和数据丢包的网络化系统故障检测问题,虽然考虑了非理想网络中存在的一些现象,但是并没有研究数据通信协议对系统稳定性以及控制和滤波要求产生的影响;文[13]针对带有时延和量化等问题的网络化系统故障检测问题,通过引入事件触发机制,有效地减轻了网络带宽负载并提高了系统的通信效率,但是同时也减少了一些传感器数据的传输;文[14-15]分别对线性系统和非线性系统提出了不同的故障检测方法,但是两者只考虑了网络中存在Bernoulli数据丢包现象,没有综合分析非线性扰动、传感器饱和以及通信协议对系统故障检测效果的影响.
需要指出的是,在上述提及的多传感器网络中,多个传感器将采集到的数据打成一个数据包,利用同一网络通道进行传输.由于通讯网络存在一定的带宽约束,数据的接收和发送受到一定的限制[16],但此时如果采用多包传输机制,又容易造成数据的冲突和时序混乱等问题,这有可能会破坏数据帧的结构,导致数据失真.因此需要设计一种特定的通信协议来管理各个传感器访问网络的权限.为了有效节约带宽,可以在某一时刻,只赋予某几个传感器访问网络的权限.目前,常用的网络调度通信协议有SCP(Stochastic Communication Protocol)[17]、TOD(Try Once Discard)协议[18]和RR(Round-Robin)协议[19].其中SCP和TOD协议属于动态调度协议,RR协议属于静态调度协议;相比于前两者,后者建模简单并且更容易在底层实现.目前已有许多相关研究成果,文[20]研究了基于RR协议和加权TOD协议时变系统的集员滤波问题,虽然通信协议的使用很好地避免了数据冲突问题,但是在该协议下系统的故障检测问题并没有涉及;文[21]针对一类线性时不变系统,探讨了在RR协议约束下系统的闭环反馈控制问题;文[22]研究了RR协议约束下,时变系统的分布式鲁棒估计问题.虽然基于RR协议控制与滤波问题有了较为深入的研究,但到目前为止,传感器饱和约束下基于RR协议网络化系统的故障检测问题尚未引起关注,这激起了作者的研究兴趣.
本文在RR协议的基础上,考虑传感器的饱和约束,研究非线性NCSs故障检测滤波器的设计问题.首先建立RR协议下系统的测量输出模型,利用李亚普诺夫稳定性理论和线性矩阵不等式(Linear Matrix Inequality,LMI)技术分析滤波误差系统的稳定性,然后基于这一稳定性判据导出故障检测滤波器存在的充分条件,再通过求解不等式约束的最优化问题得到滤波器参数.最后利用一个数值仿真和基于网络的DTS200三容水箱渗漏检测实例,验证了本文所提方法的有效性和实用性.
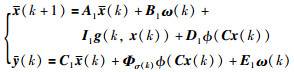
1 问题描述 1.1 系统的建模考虑如下形式的系统

|
(1) |
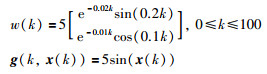
其中,x(k)∈Rn是系统的状态向量;y (k)∈Rm是系统的可测量输出;yϕ(k) ∈ Rm为带有饱和约束的系统输出;w (k)∈Rl和f(k)∈ Rl分别是系统的扰动输入和待检测故障信号;g (k,x (k))∈Rn是系统的一个非线性函数;w (k)∈l2[0,∞),并且A、Aw、Af、Aw1和C均为已知的具有适当维数的矩阵.
非线性向量值函数g (k,x (k))满足扇形有界条件,即对于所有的k∈N,使得g (k,0)=0成立且
|
(2) |
其中,R1∈Rn×n和R2∈Rn×n是已知实常矩阵.
饱和函数sat(·)定义为

|
(3) |
其中,satj(vj)=sgn(vj)·min{ vj,max,| vj|},vj,max是饱和水平向量vmax的第j个元素.这里的“sgn”表示为符号函数.
定义1 对于一个非线性向量值函数ϕ(·),给定两个实矩阵K1∈Rm×m,K2∈Rm×m,并且KK=2-K1是一个正定对称矩阵[24],满足

|
(4) |
则称该非线性函数ϕ(·)满足扇形有界条件,并且ϕ(·)属于区间[K1,K2].因此,该饱和函数可以分解为一个线性部分和一个非线性部分的和,即

|
(5) |
其中,ϕ(Cx (k))是一个非线性向量值函数,并且满足扇形界条件,即

|
(6) |
由上述可知,系统的饱和输出yϕ(k)可以表示为

|
(7) |
为了解决多个传感器在同一采样时刻使用通信网络所造成的网络拥塞等问题,在此引入RR网络通信协议.假设在传感器网络处共有M个节点,定义在k时刻具有权限进行通信的传感器节点为

|
(8) |
其中函数mod(N,M)表示N对M模运算,其值为N除以M的余数.由式(8)可知,随着离散时间k的增加,σ(k)的取值始终在节点值{1,2,…,M}之间循环.
则传输信息的更新原则表示为

|
(9) |
其中,yi(k)表示在k时刻经过网络传输的第i个传感器输出,即故障检测滤波器输入的第i个分量.由上可知,故障检测滤波器的全部输入定义为

|
根据式(9)所示的数据更新原则,本文中故障检测滤波器的输入表示为

|
(10) |
其中,

令
|
(11) |
其中
|
结合以上分析,设计如下所示的全阶故障检测滤波器
|
(12) |
其中,

令
|
(13) |
其中
|
通过上述滤波误差系统的设计,基于RR通信协议的故障检测滤波器设计问题就可以转化为H∞滤波问题:设计一个形如式(12)的故障检测滤波器,使得残差信号和故障信号之间的差值尽可能的小,并且满足下列要求:
1) 滤波误差系统(13)是均方渐进稳定的.
2) 在零初始条件下,系统的H∞性能指标γ满足下列不等式

|
(14) |
并且要求γ尽可能的小.
利用系统的残差评估机制来判断系统是否发生故障,其中包含一个评估函数J(k)和一个阈值Jth,具体如下所示
|
(15) |
这里T是评估时间区间的长度.通过对比J(k)和Jth的值,可以检测出是否有故障出现:

|

|
引理1([23]):对于矩阵A,Q=QT和P >0,AT PA-Q < 0成立当且仅当存在一个矩阵G,满足
|
(16) |
在接下来的设计中,将会给出滤波误差系统(13)均方渐进稳定的充分条件,并且使得性能指标γ尽可能的小.
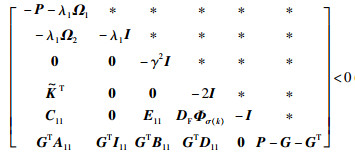
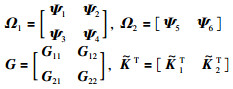
2.1 系统均方渐进稳定及H∞性能分析定理1 对于给定常数M,λ1>0,γ>0和滤波器参数AF,BF,CF,DF,如果存在正定矩阵P >0,使得不等式(17)成立,则称滤波误差系统(13)是均方渐进稳定的.
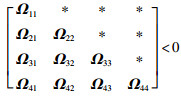
|
(17) |
其中,
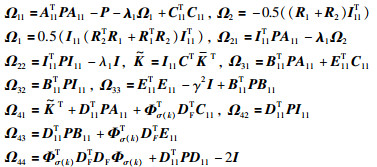
|
证明:定义如下李亚普诺夫函数

|
(18) |
其中,P>0.
沿着系统(13)的轨迹求偏差可知

|
(19) |
这里定义

|
将式(13)代入式(19),并将其展开可得
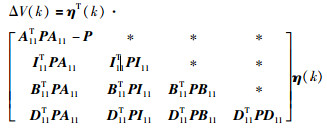
|
(20) |
考虑到式(6)中的饱和函数,可以得到

|
(21) |
结合式(20)和式(21),可以得到

|
(22) |
同时考虑到系统中的非线性函数,并且可由式(2)推导出

|
(23) |
其中,λ1>0.结合式(20)、式(22)和式(23),可以得到
|
(24) |
其中
|
下面进行性能指标的分析,为满足式(14)中的性能指标的要求,对式(17)运用Schur补引理可以得到如下表达式

|
(25) |
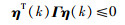
并且由式(21)和式(23)可推导出

|
(26) |
对上式两边同时取k从0到∞进行累加可得

|
(27) |
假设系统的初始状态为η(0)=0,并且本系统是均方渐进稳定的,故可知V(∞)和V(0)的值均为0,所以可以满足式(14)性能指标的要求.至此,定理1证明完毕.
由于式(17)中存在系统参数的非线性项,在Matlab中无法直接求解出本文所需要的参数,故需要进行如下处理.
2.2 故障检测滤波器存在的充分条件定理2 对于给定常数M和λ1>0,如果存在一个矩阵P >0和具有适当维数的矩阵
|
(28) |
其中:
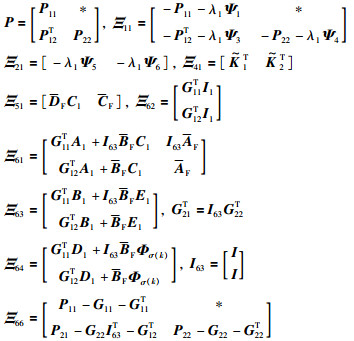
|
而且,如果式(28)是可行的,则滤波器的参数可以给成如下形式
|
(29) |
其中:G22∈Rn×n为非奇异矩阵.
证明:应用Schur补引理和引理1,可将式(17)转换为
|
(30) |
同时令
|
为了方便求解出滤波器的参数,在此需要分块矩阵P为
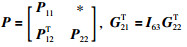
|
(31) |
则滤波器参数表示如下

|
(32) |
经过矩阵运算,可由式(30)推导出式(28),并且由于G22是可逆的,因此滤波器参数可以直接从式(32)中获得.证明完毕.
对于系统式(13),通过求解以下凸优化问题,可以获得最优的故障检测滤波器参数及对应的最优H∞性能指标γ:

|
(33) |
s.t.:式(28),
本节通过两个仿真例子验证基于RR通讯协议网络化控制系统鲁棒故障检测方法的有效性和实用性.
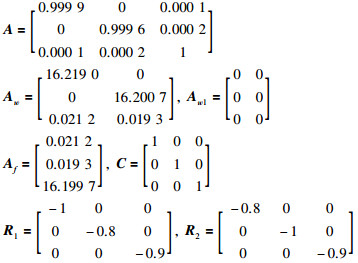
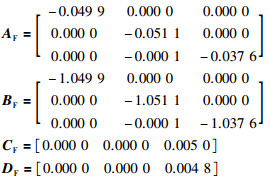
3.1 数值仿真选取如下系统参数:
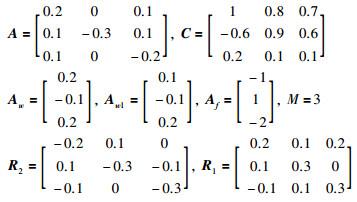
|
这里取饱和函数为

|
其中
|
为了体现故障检测滤波器的作用,假设故障信号f(k)和非线性函数g(k,x (k))分别为
|
同时,在系统(1)中,给出了扰动输入,并且在实际系统中,扰动输入总是存在的,所以本文给出的扰动输入如下所示

|
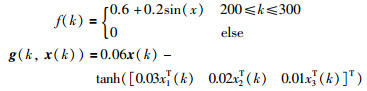
利用Matlab中的LMI工具箱,求解式(33),可以得出最小性能指标γ=1.476 3,λ1=1.012 2.最优滤波器参数如下所示
|
需要指出的是,本例中系统有3个传感器节点,因此同时对σ(k)=1,2,3时求解最优化问题式(33),调用LMI工具箱的mincx函数,便可获得3个节点情况下的最优一组数据.
取系统的初始状态为x(0)=[0 0 0]T,y(-1)= 

|
| 图 1 RR协议下3个节点的活动情况 Fig.1 The activated situation of three sensors under the RR protocol |

|
| 图 2 系统残差信号r(k) Fig.2 System residual signal r(k) |

|
| 图 3 系统残差评估函数J(k) Fig.3 System residual evaluation function J(k) |
通过图 1可以看出,在RR通信协议作用下,每个传感器节点有相同的权限访问网络;从图 2可以清晰地看出在200≤k < 300时,系统发生了故障,残差信号r(k)有较为明显的波动;从图 3可以看出,系统在k=200发生故障后,残差评函数J(k)曲线逐渐超越阈值Jth.根据(15)式中残差评价机制,当k=214时故障被检测出来.从以上仿真结果来看,本文所设计的故障检测滤波器不仅能够有效检测故障的发生,而且对扰动有一定的抑制能力.
3.2 实例仿真这是一个经典的三容水箱渗漏检测例子[26-28].仿真选用的DTS200三容水箱系统是由德国Amira自动化公司生产的实验室设备,它的主体部分主要由3个水箱、2个水泵以及3个出水口组成,其中3个水箱的液位为状态变量,其具体结构如图 4所示.

|
| 图 4 DTS200设备结构图 Fig.4 The structure of DTS200 equipment |
由托里切利定律可知,该系统的非线性模型可以建立为
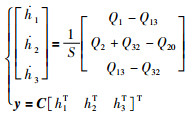
|
(34) |
其中:h1,h2,h3分别为3个水箱的液位高度,Q1和Q2分别表示水箱1和水箱2的液体流入流量.
|
Qij表示从第i个水箱到第j个水箱的流量
Sn=5×10-5m2为水箱之间所有连接阀的横截面积,S=0.015 4 m2为水箱的横截面积;az1=0.450,az2=0.611,za3=0.462分别为三个水箱的流出系数,g=9.8 m/s2为重力加速度.
将非线性系统(34)在某一工作点处线性化;并利用泰勒展开式将系统(34)在平衡点处展开,得到连续系统的状态空间模型,取平衡点液位高度为h10=15 cm,h20=7 cm,h30=10 cm,采样周期T=0.1 s,利用零阶保持器可将连续系统转换成离散系统.由于DTS200的液位值测量简单方便,因此考虑输出饱和约束区间上下界分别为K1=K2=I ∈R3×3,即可以得到如下离散系统:
|
其中:
|
系统的输出是3个水箱的液位高度,每个水箱的液位高度数据均需要通过网络进行传输.
对于水箱1中的液体渗漏故障[29],由托里切利定律可知,其渗漏部分液体的数学表达式为
|
状态扰动和非线性函数分别为
|
给定初始状态为

|
故障发生时,残差信号的变化曲线如图 5所示,当k=30时刻系统发生故障,残差曲线波动加剧.图 6表示残差评估函数J(k)的变化,从图中可以看出,当渗漏故障发生后,残差评估曲线陡然上升,利用式(15)中的残差评估机制,可以判断系统在k=36时刻检测出水箱1有渗漏,并发出警报.从以上实验结果来看,本文所提出的算法能够有效检测基于RR协议的DTS200三容水箱液体渗漏故障.

|
| 图 5 DTS200系统残差信号r(k)图 Fig.5 The system residual signal r(k) of DTS200 |

|
| 图 6 DTS200残差评估函数J(k)图 Fig.6 The system residual evaluation function J(k) of DTS200 |
本文研究了一种基于Round-Robin协议离散时间非线性网络化控制系统的鲁棒故障检测问题.首先构建故障检测滤波器,将故障检测问题转化成带有非线性约束的鲁棒H∞滤波问题,然后利用李亚普诺夫稳定性理论和LMI技术,得到滤波误差系统的稳定性条件,再通过求解凸优化问题得到最优故障检测滤波器参数.所设计的故障检测滤波器能够有效检测系统发生的故障,而且满足H∞性能指标.最后分别通过数值仿真和DTS200三容水箱实例仿真验证了本文所提方法的有效性.
在本文的基础上,下一步将要开展基于动态调度通信协议的融合故障检测滤波的设计方法.
| [1] |
刘艳, 潘丰.
丢包网络化控制系统非脆弱量化H∞控制[J]. 信息与控制, 2016, 45(3): 320–327.
Liu Y, Pan F. Non-fragile quantized H∞ control for Networked control system with packet dropouts[J]. Information and Control, 2016, 45(3): 320–327. |
| [2] |
齐晓妹.网络控制系统的鲁棒故障检测与容错控制方法研究[D].济南: 山东大学, 2012. Qi X M. Robust fault detection and fault tolerant control for networked control systems[D]. Jinan: Shandong University, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10422-1013140539.htm |
| [3] | Yan H C, Qian F F, Yang F W, et al. H∞ filtering for nonlinear networked systems with randomly occurring distributed delays, missing measurements and sensor saturation[J]. Information Science, 2016, 370. |
| [4] | Venkata R P, Tan Y C, Lakshminarayanan S. A mechanistic fault detection and isolation approach using kalman filter to improve the security of cyber physical systems[J]. Journal of Process Control, 2018, 68: 160–170. DOI:10.1016/j.jprocont.2018.05.005 |
| [5] |
周东华, 纪洪泉, 何萧.
高速列车信息控制系统的故障诊断技术[J]. 自动化学报, 2018, 44(7): 1154–1163.
Zhou D H, Ji H Q, He X. Fault diagnosis techniques for the information control systems of high-speed trains[J]. Acta Automatica Sinica, 2018, 44(7): 1154–1163. |
| [6] | Thaha M, Riaz A S. An analysis of fault detection strategies in wireless sensor networks[J]. Journal of Network and Computer Applications, 2017, 78(15): 267–287. |
| [7] | Ding S X. Model-based fault diagnosis techniques-design schemes, algorithms and tools (2nd ed.)[M]. London, UK: Springer-Verlag, 2013. |
| [8] | Zhou D H, Ji H Q, He X. Fault detection and isolation of the brake cylinder system for electric multiple units[J]. IEEE Transactions on Control Systems Technology, 2018, 26(5): 1744–1757. DOI:10.1109/TCST.2017.2718979 |
| [9] | Dong H L, Wang Z D, Gao H J. Fault detection for Markovian jump systems with sensor saturations and randomly varying nonlinearities[J]. IEEE Transactions on Circuits and Systems I:Regular Papers, 2012, 59(10): 2354–2362. DOI:10.1109/TCSI.2012.2185330 |
| [10] | Dong H L, Wang Z D, Gao H J. On design of quantized fault detection filters with randomly occurring nonlinearities and mixed time-delays[J]. Signal Processing, 2012, 92(4): 1117–1125. |
| [11] | He X, Wang Z D, Zhou D H. Robust fault detection for networked systems with communication delay and data missing[J]. Automatica, 2009, 45(11): 2634–2639. DOI:10.1016/j.automatica.2009.07.020 |
| [12] | Jiang S, Fang H J. Robust fault detection for networked control systems with nonlinear disturbances and imperfect measurements[J]. International Journal of Systems Science, 2013, 44(11): 2027–2038. DOI:10.1080/00207721.2012.683833 |
| [13] | Tan Y S, Du D S, Fei S M. Co-design of event generator and quantized fault detection for time-delayed networked systems with sensor saturations[J]. Journal of the Franklin Institute, 2017, 354(15): 6914–6937. DOI:10.1016/j.jfranklin.2017.08.002 |
| [14] |
杨蒙蒙, 钱伟.
基于神经网络预测的网络化控制系统故障检测[J]. 信息与控制, 2018, 47(1): 36–40.
Yang M M, Qian W. Fault detection of networked control systems based on neural networked prediction[J]. Information and Control, 2018, 47(1): 36–40. |
| [15] |
罗小元, 李娜, 徐奎, 等.
具有随机丢包的非线性网络化控制系统鲁棒故障检测[J]. 控制与决策, 2013, 28(10): 1596–1600.
Luo X Y, Li N, Xu K, et al. Robust fault detection for nonlinear networked control systems with random packets loss[J]. Control and Decision, 2013, 28(10): 1596–1600. |
| [16] |
邹磊.基于通信协议的网络化系统控制及滤波问题研究[D].哈尔滨: 哈尔滨工业大学, 2016. Zou L. On control and filtering of networked systems with communication protocols[D]. Harbin: Harbin Institute of Technology, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10213-1016739760.htm |
| [17] | Zhang J, Peng C, Fei M R, et al. Output feedback control of networked systems with a stochastic communication protocol[J]. Journal of the Franklin Institute, 2017, 354(9): 3838–3853. DOI:10.1016/j.jfranklin.2016.02.009 |
| [18] | Zou L, Wang Z D, Han Q L, et al. Ultimate boundedness control for networked systems with try-once-discard protocol and uniform quantization effects[J]. IEEE Transactions on Automatic Control, 2017, 62(12): 6582–6588. DOI:10.1109/TAC.2017.2713353 |
| [19] | Zhu K Q, Song Y, Ding D R, et al. Robust MPC under event-triggered mechanism and Round-Robin protocol:An average dwell-time approach[J]. Information Sciences, 2018, 457: 126–140. |
| [20] | Zou L, Wang Z D, Gao H J. Set-membership filtering for time-varying systems with mixed time-delays under Round-Robin and Weighted Try-Once-Discard protocols[J]. Automatica, 2016, 74: 341–348. DOI:10.1016/j.automatica.2016.07.025 |
| [21] | Takahashi N, Knono M. Stabilization of linear time-invariant systems with periodic communication constraints by output sample hold control[J]. Artificial Life&Robotics, 2004, 8(2): 111–117. |
| [22] | Ugrinovskii V, Fridman E. A Round-Robin type protocol for distributed estimation with H∞ consensus[J]. Systems&Control Letters, 2014, 69: 103–110. |
| [23] | Guo X G, Yang G H. Reliable H∞ filter design for a class of discrete-time nonlinear systems with time-varying delay[J]. Optimal Control Applications and Methods, 2010, 31(4): 303–322,2010. |
| [24] | Yang F W, Li Y M. Set-membership filtering for systems with sensor saturation[J]. Automatica, 2009, 45(8): 1896–1902. DOI:10.1016/j.automatica.2009.04.011 |
| [25] |
刘婷, 姜顺, 潘丰.
网络控制系统前向通道随机时延的在线多步预测[J]. 信息与控制, 2017, 46(5): 620–626.
Liu T, Jiang S, Pan F. Online multi-step prediction for the random delay of the forward channel in networked control system[J]. Information and Control, 2017, 46(5): 620–626. |
| [26] | Zhou D H, He X, Wang Z D, et al. Leakage fault diagnosis for an internet-based three-tank system:An experimental study[J]. IEEE Transactions on Control Systems Technology, 2012, 20(4): 857–870. DOI:10.1109/TCST.2011.2154383 |
| [27] | Li L L, Luo H, Ding S X, et al. Performance-based fault detection and fault-tolerant control for automatic control systems[J]. Automatic, 2019, 99: 308–316. DOI:10.1016/j.automatica.2018.10.047 |
| [28] | Ding S X. Data-driven design of fault diagnosis and fault-tolerant control systems[M]. London, UK: Springer-Verlag, 2014. |
| [29] | Zhang Y, Wang Z D, Zou L, et al. Fault detection filter design for networked multi-rate systems with fading measurements and randomly occurring faults[J]. IET Control Theory&Applications, 2016, 10(5): 573–581. |