



2. 浙江大学控制科学与工程学院, 浙江 杭州 310027;
3. 国网天津市电力公司, 天津 300310;
4. 上海交通大学电气工程系, 上海 200240
2. College of Control Science and Engineering, Zhejiang University, Hangzhou 310027, China;
3. State Grid Tianjin Electric Company, Tianjin 300310, China;
4. Department of Electrical Engineering, Shanghai Jiao Tong University, Shanghai 200240, China
0 引言
近年来国民经济快速发展,能源需求日益增长,可持续发展的需求愈加迫切,清洁能源的利用逐渐受到重视.风能作为一种储量丰富、环境友好、易于获取的清洁能源,得到了大规模开发利用.依据国务院“十三五”发展规划,我国计划在2020年完成风电装机容量2亿千瓦的目标[1].
然而,风电、光伏等可再生能源机组的大量接入将对电网的稳定运行造成危害.目前,风电场大量采用基于变速恒频矢量控制的双馈感应风力发电机(DFIG),而光伏发电设备通过变流器接入电网,它们输出电压的频率被动跟随电网频率,因而无法在电网侧表现出任何惯性及阻尼特性,不能参与电网有功、频率调节,不能为电网提供频率支撑,因此当这些可再生能源渗透率较高时,电网的频率稳定性将受到严重损害[2-3].
虚拟同步机(VSG)是一种电力电子变换器控制技术.VSG通过模拟同步机的动态特性,能够使可再生能源机组为电网提供频率支撑.Beck等学者首先提出了VISMA[4]控制策略作为VSG的实现方式.VISMA使用同步机的数学模型对变流器进行控制,能够模拟同步电机的惯量,使可再生能源机组为电网提供频率支撑.然而,VISMA将变流器控制成为电流源,不能与电压源主导的电网良好兼容,实际上仍无法应用于高渗透率场景.钟庆昌等学者发展完善了VSG的实现方式,不仅提出了能够应用于可再生能源高渗透率场景的电压源型VSG[5-7],而且实现了对同步电机同步机制的模拟,取消了电网频率测量环节,显著提高了电力系统稳定性[8];进一步地,通过将VSG作为电网中不同种类电源和负载的统一接口,自主电力系统的概念也被构建[9].VSG的参数整定与解耦分析[10-11]、变参数设计[12-13]等相关理论研究也已渐次开展.
在风力发电领域,Zhao和Wang等学者分别独立提出了VSG在DFIG上的应用方案,并使用线性化方法分析了控制参数对系统性能的影响[14-16].然而,DFIG的结构特性限制了VSG的广泛应用.DFIG的转子连接至转子侧变流器(RSC),而RSC受制于成本约束,其容量通常不会过大.因此,在VSG的DFIG应用中必须考虑RSC的容量限制[7, 15].现有的VSG方案[14-16]抑制转子动态电流效果不理想,更不能为转子动态电流幅值给出严格的限制,难以应对DFIG虚拟同步化后的调频过程与故障穿越等现实场景.
本文使用保性能控制的框架解决这一问题.保性能控制[17-19]是一种新兴的控制器设计方法,能够良好应对状态受限、输出受限的非线性系统控制问题.该方法首先使用一个非线性误差映射函数将受限的状态或输出转化为不受限的中间变量,从而将原受限系统状态空间模型转化为含中间变量的不受限系统模型.保性能控制已被应用于DFIG矢量控制[20]、不间断电源系统控制[21]等多个电力场景中.
传统保性能控制器的设计需要系统参数的精确值.然而,在实际中,大型DFIG风电机组的精确参数通常无法测量,而且会受到温湿度等环境因素影响产生偏移.在这样的场景下,保性能控制的控制效果会发生劣化,甚至发生控制失效.对此,神经网络(NN)方法可以对未知的非线性函数进行拟合,已被广泛应用于非线性未知系统的控制[22-24].融合神经网络自适应与保性能控制方法的理论研究也已取得初步成果[17-19].
因此,针对以上难点,本文首次将VSG与保性能控制有机结合,提出一种面向DFIG风电机组的神经网络保性能虚拟同步控制策略,试图解决VSG用于DFIG时的转子侧动态电流限制问题.本文所提控制策略,不仅使风电机组具有了主动调频、支撑电网的能力,能够支持高渗透率的风电接入,而且能够保证转子电流时刻处于人为设定的界限之内,对RSC提供额外的保护.此外,本文使用反步法设计非线性控制器,解决了高阶系统带来的挑战,并利用神经网络自适应方法应对未知DFIG参数和外界干扰带来的不确定性,防止保性能控制效果的劣化与失效.转化后系统的稳定性由李亚普诺夫方法获得证明,从而确保原系统的受限状态,也即转子侧电流,不会超过预先设定的界限.本文最后通过大量仿真对所提算法进行了验证.
1 控制问题的建立本节将推导便于控制器设计的DFIG数学模型,并给出本文的控制目标.
1.1 双馈风机的数学模型保性能控制器的设计需要首先建立被控对象的状态空间模型,且模型需要反映输入输出之间的动态过程.本小节将从广泛使用的DFIG模型开始,推导得出转子电流保性能控制所需的动态模型.
为避免引入电网频率测量环节,使用额定转速dq坐标系下的DFIG的电压方程与磁链方程,采用标幺制及电动机惯例,表示如下[25]:

|
(1) |

|
(2) |

|
(3) |

|
(4) |

|
(5) |

|
(6) |
|
(7) |

|
(8) |
式中,
ψ——磁链;
u——电压;
i——电流;
Rs,Rr——定子电阻、转子电阻;
Lr, Ls, Lm——转子自感、定子自感、互感;
ωr——转子转速;
下标r, s, d, q——转子侧、定子侧、d轴分量、q轴分量.
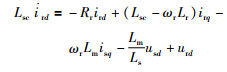
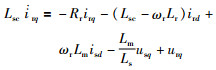
通过对式(5)~式(8)进行求导,并结合式(1)~式(4),即可得到d,q轴转子电流的控制模型:
|
(9) |
|
(10) |
式中,
|
需要指出的是,式(9)、式(10)中转子励磁电流ird、irq是被控变量,转子电压urd、urq是控制输入,其它量均为参数或可测量的干扰变量.
1.2 控制目标本文主要关注DFIG风电机组在低风速段工作区间的变速控制问题,不考虑过渡段和高风速段的变桨控制问题.因此,本文期望达到的控制目标如下:
1) 虚拟同步性能:DFIG需要模拟同步发电机的惯性与阻尼特性.在功率平衡时,有功功率输出需跟随其设定值;当因负载或其它机组出力变化而产生功率不平衡时,应能利用转子的动能,动态调整自身输出有功功率与定子频率,为电网提供必要的频率支撑.同时,机端电压幅值或无功功率应良好地跟踪设定值.
2) 保性能自适应性能:转子电流应快速跟随设定值,其跟踪误差在任何时刻不得超出人为设定的误差上下界;在DFIG参数真实值未知时,依然能够获得满意的控制跟踪性能.
2 控制器设计 2.1 整体框架本文所设计的控制器由两个部分构成:改进的VSG和保性能神经网络自适应控制.控制器的整体框架如图 1所示,图中各符号的意义将在下文对应部分加以阐释.控制器采用串级结构.VSG控制器不再直接给出电压参考值,而是作为外环,给出内环控制器的电流参考值;保性能控制作为内环,给出控制输入urd、urq,其中的神经网络自适应律负责应对未知的DFIG参数.

|
| 图 1 控制器的整体结构 Fig.1 The whole structure of the proposed controller |
外环VSG包含有功环路的同步机特性模拟与无功/电压环路的PI控制.由于控制器整体采用电压—电流串级结构,两个环路的输出相应地修改为转子励磁电流参考值的频率ωex、相角θex及转子励磁电流参考值的幅值Ir,ref.
1) 有功环路控制
有功环路的控制器需要模拟同步电机的惯量与阻尼特性(即摇摆方程),控制律如图 2所示.

|
| 图 2 虚拟同步控制器有功环结构 Fig.2 Active power part of the VSG control loop |
图 2中,
Jv,Dv——VSG的虚拟惯量、虚拟阻尼;
Ps——定子电磁功率;
ωex,θex——静止坐标系下转子电流设定值的频率、相角;
ω0——电网额定频率,取为1 p.u.;
s——拉普拉斯算子;
下标ref——设定值.
注意到,由于内环保性能控制器的输入为转子电流设定值,VSG有功环的输出ωex、θex也相应地设置为转子电流设定值的频率、相角,而非转子励磁电压的对应量.
2) 无功环路控制
无功环路采用PI控制,其输入为机端电压幅值的跟踪误差Us,ref-Us或定子无功功率的跟踪误差Qs,ref-Qs,输出为转子电流设定值的幅值Ir,ref.环路输入的选取原则如下:当接入点短路比较小,即DFIG需要支撑电网的电压时,应选取机端电压幅值跟踪误差;否则宜选取定子无功功率跟踪误差.
注1 无功环路PI参数的整定应尽可能减小控制器输出(即转子电流设定值的幅值)的超调量.否则,若环路输出的超调过大,以至轻易超出RSC的容量限制,则保性能控制将失去意义.
3) 合成变换
外环两环路的输出分别是转子电流设定值的幅值和相角,而内环保性能控制器的输入是转子电流d,q轴分量的跟踪误差.因此,在将VSG控制器的输出送入保性能控制器前,需要进行合成变换,将其输出变换为转子电流设定值的d,q轴分量.
此外,保性能控制器的输出urd、urq也需经过2 r/3 s变换,得到DFIG三相励磁电压ura、urb、urc,以用于RSC的PWM波形调制.
注2 经过恰当的参数整定,VSG能够赋予可再生能源机组良好的频率调节能力,增强电网的频率稳定性,同时保证调频过程中机组自身的良好稳定性[10-16].
注3 VSG一般需要储能系统来补偿调频过程中的不平衡功率;而当VSG被应用于DFIG风电机组时,为节省成本,可利用桨叶与发电机转子的惯性与动能来补偿不平衡功率,这也是本文采用的方案.此时,VSG参数的整定将额外要求调频过程中转子转速波动不能过大,以免造成停机等事故.近年来,风电场逐渐注重使用储能系统来平抑波动,削峰填谷,因此基于储能的风机VSG将逐渐消除成本劣势.
2.3 神经网络保性能控制部分保性能控制的目标是保证d,q轴励磁电流分量的跟踪误差时刻处于设定的上下界之内.注意到模型(9)、模型(10)具有高度的对称性,为简洁起见,本小节将仅给出d轴保性能控制器的详细描述.
1) 误差映射与系统转化
为了处理误差的上下界约束,引入一个误差映射函数,将受限的跟踪误差映射为不受限的中间变量.函数的形式为
|
(11) |
式中:
|
易得,当误差ed达到任一界限时,中间变量sd将趋向于无穷.因此,若能通过控制器设计使sd有界稳定,则相应地ed必将处于设定的界限之内.
保性能控制器的设计要求系统模型含有sd的动态.因此,对sd求导,可得如下动态过程:
|
(12) |
式中,

|
(13) |
|
(14) |
式(12)~式(14)即为转化后的不受限系统模型,将替代模型(9)用于保性能控制器的设计.
2) 保性能控制器设计
若被控对象DFIG的所有参数都为精确已知,则依据系统模型(12)~(14),控制器可设计为如下形式:
|
(15) |
式中,kd∈R+为大于0的控制器参数.
进一步地,考虑现实应用中DFIG参数的未知及不确定性,将在控制器(15)中引入神经网络单元以逼近模型中含有DFIG参数的动态性能,从而补偿未知系统带来的性能下降,达到自适应的目的.首先定义上述含有DFIG参数的未知动态性能为

|
(16) |
式中,

|
(17) |
式中,
V NN,d——神经网络权值矩阵,各元素为固定产生的随机数;
Wd——神经网络权值矩阵,需要通过设计自适应律来实时更新;
εd——神经网络的重建误差;
ϕ——激活函数.
这样,利用神经网络逼近,控制律可以改写为

|
(18) |
式中,ρd∈R+为控制器参数;

|
(19) |
式中,
|
至此,式(18)、式(19)构成了神经网络保性能自适应控制律的完整形式.
2.4 保性能控制部分的稳定性证明本小节将证明使用控制律(18)、(19)时,整个内环系统的有界稳定.
在给出稳定性证明之前,首先给出一个合理假设:
假设1 



此外,本文不加证明地给出以下引理,以说明权值估计
引理1 (自适应律的有界稳定)[18]给定紧集Ωd= 


定理1(保性能控制的有界稳定)令假设1成立.考虑式(9)描述的DFIG风力发电机组动态系统,若其控制律urd和自适应律由式(18)、式(19)给出,则转子电流ird能够跟踪其设定值ird,ref,且跟踪误差ed时刻处于上下界
证明选取李亚普诺夫函数Vd:

|
(20) |
对时间求导,可得:
|
(21) |
引入Qd的定义式(16),式(21)可改写为
|
(22) |
Qd的神经网络逼近又可以写为如下形式:

|
(23) |
其中,

|
(24) |
其中,
|
(25) |
最后,将控制律(18)代入式(24),可得
|
(26) |
式(26)第1项为负定项,第2项为与信号量无关的正定项.依据引理1与李亚普诺夫稳定性定理,可得信号sd的有界稳定性,进而可得,原受限系统的跟踪误差ed被始终限制在其上下界之内.
3 仿真验证本节将通过仿真研究,验证本文所提控制策略的有效性.仿真平台使用Matlab r2018b/Simulink 9.2仿真环境.
3.1 单机并网带负载仿真本小节将通过单机接入大电网场景的离线仿真,来验证VSG参与有功调节的能力、保性能控制的有效性以及自适应设计对于不确知参数的良好应对能力.系统模型如图 3所示,仿真参数如表 1~表 3所示.

|
| 图 3 并网仿真系统模型 Fig.3 Model of grid-connected simulation system |
| 参数 | 参数值/p.u. |
| Rs | 0.023 |
| Rr | 0.016 |
| Ls | 3.08 |
| Lr | 3.06 |
| Lm | 2.90 |
| J1 | 6.00 |
| 1 J为风电机组桨叶及转子的惯性. | |
| 参数 | 参数值 |
| 电网频率 | 59.9 Hz |
| 短路比 | 5 |
| 初始负载有功 | 1 p.u. |
| 初始负载无功 | 0.1 p.u. |
| 突增负载有功 | 0.33 p.u. |
| 突增负载无功 | 0 p.u. |
| 控制器 | 参数 | 参数值 |
| 虚拟同步有功环 | Jv | 12p.u. |
| dv | 40p.u. | |
| 虚拟同步无功环 | kP1 | 0 |
| kI1 | 0.3 | |
| 保性能控制律 |  |
-0.05p.u. |
 |
0.05p.u. | |
 |
1 | |
 |
0.5 | |
| 自适应律 |  |
10 |
 |
 |
|
| 采样、控制频率 | fs | 1 kHz |
| 1 kP,kI为PI控制的比例系数、积分系数. | ||
虚拟同步控制器的电压/无功环采用无功控制.仿真过程中,令负载额定有功功率在t=0 s发生0.33 p.u.的突增,即突增功率约为DFIG额定功率的1/3.
图 4给出了负载突增后,DFIG输出有功功率和转子转速的变化过程.突增负载的额定有功功率约为此时风能捕获功率的75%.图中可见,DFIG输出功率首先经历一个由突降到突增的过程,然后逐渐恢复至负载变化前的值;相应地,转子转速首先降低,以释放桨叶和转子的动能以供输出功率的瞬时增加,然后逐渐振荡恢复至原值.

|
| 图 4 负载突增后的输出有功功率与转子转速 Fig.4 Active power output and rotor speed after a sudden load increment |
功率的突降是由于负载接入后的瞬间,电网电压降低所导致;此后,VSG发挥作用,使得输出功率快速增加,以试图提供突增负载所需功率,减轻网侧其它机组有功调节的压力;最终,DFIG输出有功功率恢复原值,这是由于风电机组在低风速段采用最大功率点跟踪(MPPT)策略,负载突增前的输出功率已经是其当前风速最大风能捕获功率,在风速不变的前提下,稳态输出功率不会增加.此时,负载所需功率中,超过风能捕获功率的部分全部由电网提供.
图 5给出了负载突增后的转子电流幅值设定值、幅值真实值及d,q分量.幅值设定值呈现轻微波动,而真实值能够良好跟踪设定值.由于PI控制器的良好整定,以及接入点较大的短路比,因此电流幅值设定值并未发生大幅波动.电流的d,q分量均呈0.1 Hz正弦波,这是由于参考坐标系以额定转速(60 Hz)旋转,而电网的实际频率是59.9 Hz.

|
| 图 5 负载突增后电流控制效果 Fig.5 Current control performance after a sudden load increment |
图 6给出了在DFIG参数出现严重偏差的情况下,本文控制器与非自适应的保性能虚拟同步控制器[26]的d轴电流跟踪误差对比图.这个仿真中,DFIG的定子自感、转子自感、互感均较标称值增加1 p.u.,出现了严重的参数偏差.可见,本文控制器能将励磁电流跟踪误差时刻限制在界限内,达到了保性能的目的;神经网络自适应方法显著降低了电流跟踪误差和转子电流的波动幅度,起到了防止保性能控制效果劣化的作用.若DFIG参数继续漂移,或电网频率发生变化,则非自适应控制策略存在误差越界、控制器失效的风险.

|
| 图 6 两个控制器电流跟踪误差对比 Fig.6 Comparison of current tracking error between two controllers |
注4 保性能控制有效的前提是,电力系统在稳态运行时,所要求的DFIG励磁电流不能超出RSC的容量.若上述条件不能满足,例如DFIG必须过载以支撑电网负荷时,任何控制策略均无法同时保证电网的稳定运行与DFIG的励磁电流不越界.
3.2 单机并网低电压穿越仿真比较本文所提控制器、非自适应的保性能VSG控制器[26]、虚拟电阻VSG控制器[15]在极端条件下的电流控制性能.仿真中,电网频率设置为59.95 Hz,本地负载设置为仅有0.1 p.u.的额定有功功率,DFIG的定子自感、转子自感、互感均较标称值增加1 p.u.,出现了严重的参数偏差.当t=0 s时,网侧出现持续0.5 s的三相接地故障,致使电网电压发生100%的跌落.当检测到电网电压跌落时,本文控制器参数ρd、ρq立即修改为0.075.虚拟电阻VSG控制器的虚拟电阻整定为2 p.u.,以平衡正常运行时的稳定性、故障穿越时的电流抑制效果与故障恢复时的控制效果.
图 7是3个控制器在故障穿越过程中的转子电流幅值,图 8是3个控制器的转子侧励磁电压.可见,本文提出的控制器相较于非保性能的虚拟电阻控制器,对故障电流有更明显的抑制效果,且能够明显抑制故障恢复过程中转子电压的抖动;相比于非自适应的保性能控制器,能够产生更低的转子侧励磁电压,更好地保护RSC等设备.注意到非自适应控制器在故障清除的瞬间产生了极大的转子电压,这在实际系统中是无法实现的,因此本文控制器的神经网络自适应设计也能保证控制策略的实用性.

|
| 图 7 3个控制器故障电流对比 Fig.7 Comparison of fault current among three controllers |

|
| 图 8 3个控制器故障穿越转子电压对比 Fig.8 Comparison of FRT rotor voltage among three controllers |
本文提出了一种应用于双馈感应风力发电机的神经网络自适应保性能虚拟同步控制策略,并通过仿真对所提控制算法进行了验证.虚拟同步控制赋予了风电机组主动参与有功和频率调节的能力,能够有力地支持高渗透率风电接入;保性能控制能够有效控制转子电流跟踪误差不越界,保护转子侧变流器并提供良好的电流控制性能;神经网络自适应策略能够良好地应对实际运行环境中风电机组参数的不准确问题,防止保性能控制效果的劣化.
本文的保性能自适应控制思想还可以与高风速段的变桨控制、风机的启停控制相结合.此外,针对定子侧变流器的虚拟同步化研究也将是未来有价值的研究方向.
| [1] |
国务院."十三五"控制温室气体排放工作方案(国发[2016] 61号)[EB/OL].(2016-11-04)[2016-11-04]. http://www.gov.cn/zhengce/content/2016-11/04/content_5128619.htm. The State Council of the People's Republic of China. Work program on greenhouse gas emission control during the 13th Five Year Plan (No.61 document of the State Council[2016])[EB/OL].(2016-11-04)[2016-11-04]. http://www.gov.cn/zhengce/content/2016-11/04/content_5128619.htm. |
| [2] | Zhong Q. Virtual synchronous machines:A unified interface for grid integration[J]. IEEE Power Electronics Magazine, 2016, 3(4): 18–27. DOI:10.1109/MPEL.2016.2614906 |
| [3] | Bevrani H, Ise T, Miura Y. Virtual synchronous generators:A survey and new perspectives[J]. International Journal of Electrical Power and Energy Systems, 2014, 54: 244–254. DOI:10.1016/j.ijepes.2013.07.009 |
| [4] | Beck H, Hesse R. Virtual synchronous machine[C]//20079th International Conference on Electrical Power Quality and Utilization. Piscataway, NJ, USA: IEEE, 2007: 1-6. |
| [5] | Zhong Q, Weiss G. Static synchronous generators for distributed generation and renewable energy[C]//2009 IEEE/PES Power Systems Conference and Exposition. Piscataway, NJ, USA: IEEE, 2009: 1-6. https://www.researchgate.net/publication/224408026_Static_synchronous_generators_for_distributed_generation_and_renewable_energy |
| [6] | Zhong Q, Weiss G. Synchronverters:Inverters that mimic synchronous generators[J]. IEEE Transactions on Industrial Electronics, 2011, 58(4): 1259–1267. DOI:10.1109/TIE.2010.2048839 |
| [7] |
吕志鹏, 盛万兴, 钟庆昌, 等.
虚拟同步发电机及其在微电网中的应用[J]. 中国电机工程学报, 2014, 34(16): 2591–2603.
Lü Z P, Sheng W X, Zhong Q C, et al. Virtual synchronous generator and its applications in micro-grid[J]. Proceedings of the CSEE, 2014, 34(16): 2591–2603. |
| [8] | Zhong Q, Nguyen P, Ma Z, et al. Self-synchronized synchronverters:Inverters without a dedicated synchronization unit[J]. IEEE Transactions on Power Electronics, 2014, 29(2): 617–630. DOI:10.1109/TPEL.2013.2258684 |
| [9] |
钟庆昌.
虚拟同步机与自主电力系统[J]. 中国电机工程学报, 2017, 37(2): 336–348.
Zhong Q C. Virtual synchronous machines and autonomous power systems[J]. Proceedings of the CSEE, 2017, 37(2): 336–348. |
| [10] |
吴恒, 阮新波, 杨东升, 等.
虚拟同步发电机功率环的建模与参数设计[J]. 中国电机工程学报, 2015, 35(24): 6508–6518.
Wu H, Ruan X B, Yang D S, et al. Modeling of the power loop and parameter design of virtual synchronous generators[J]. Proceedings of the CSEE, 2015, 35(24): 6508–6518. |
| [11] | Li B, Zhou L, Yu X, et al. Improved power decoupling control strategy based on virtual synchronous generator[J]. IET Power Electronics, 2017, 10(4): 462–470. DOI:10.1049/iet-pel.2016.0608 |
| [12] | Torres L M, Lopes L, Morán T L, et al. Self-tuning virtual synchronous machine:A control strategy for energy storage systems to support dynamic frequency control[J]. IEEE Transactions on Energy Conversion, 2014, 29(4): 833–840. DOI:10.1109/TEC.2014.2362577 |
| [13] | Alipoor J, Miura Y, Ise T. Power system stabilization using virtual synchronous generator with alternating moment of inertia[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2015, 3(2): 451–458. DOI:10.1109/JESTPE.2014.2362530 |
| [14] | Zhao Y, Chai J, Sun X. Virtual synchronous control of grid-connected DFIG-based wind turbines[C]//2015 IEEE Applied Power Electronics Conference and Exposition (APEC). Piscataway, NJ, USA: IEEE, 2015: 2980-2983. https://www.researchgate.net/publication/282160886_Virtual_synchronous_control_of_grid-connected_DFIG-based_wind_turbines |
| [15] | Wang S, Hu J, Yuan X. Virtual synchronous control for grid-connected dfig-based wind turbines[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2015, 3(4): 932–944. DOI:10.1109/JESTPE.2015.2418200 |
| [16] | Wang S, Hu J, Yuan X, et al. On inertial dynamics of virtual-synchronous-controlled DFIG-based wind turbines[J]. IEEE Transactions on Energy Conversion, 2015, 30(4): 1691–1702. DOI:10.1109/TEC.2015.2460262 |
| [17] | Meng W, Yang Q, Si J, et al. Adaptive neural control of a class of output-constrained nonaffine systems[J]. IEEE Transactions on Cybernetics, 2016, 46(1): 85–95. DOI:10.1109/TCYB.2015.2394797 |
| [18] | Meng W, Yang Q, Sun Y. Adaptive neural control of nonlinear MIMO systems with time-varying output constraints[J]. IEEE Transactions on Neural Networks and Learning Systems, 2015, 26(5): 1074–1085. DOI:10.1109/TNNLS.2014.2333878 |
| [19] | Chen Z T, Li Z J, Chen C L. Adaptive neural control of uncertain MIMO nonlinear systems with state and input constraints[J]. IEEE Transactions on Neural Networks and Learning Systems, 2017, 28(6): 1318–1330. DOI:10.1109/TNNLS.2016.2538779 |
| [20] | Meng W, Yang Q, Sun Y. Guaranteed performance control of DFIG variable-speed wind turbines[J]. IEEE Transactions on Control Systems Technology, 2016, 24(6): 2215–2223. DOI:10.1109/TCST.2016.2524531 |
| [21] | Li B, Fan B, Yang Q, et al. Adaptive performance-guaranteed control of UPS systems[C]//2016 IEEE International Conference on Information and Automation (ICIA). Piscataway, NJ, USA: IEEE, 2016: 258-263. |
| [22] |
王旭东, 邵惠鹤.
RBF神经网络理论及其在控制中的应用[J]. 信息与控制, 1997, 26(4): 272–284.
Wang X D, Shao H H. The theory of RBF neural network and its application in control[J]. Information and Control, 1997, 26(4): 272–284. |
| [23] |
乃永强, 李军.
基于极限学习机的机械臂自适应神经控制[J]. 信息与控制, 2015, 44(3): 257–262.
Nai Y Q, Li J. Adaptive neural control of manipulators based on extreme learning machine[J]. Information and Control, 2015, 44(3): 257–262. |
| [24] |
于霜, 刘国海, 梅从立, 等.
多变量发酵过程的神经网络在线解耦控制[J]. 信息与控制, 2013, 42(3): 341–350.
Yu S, Liu G H, Mei C L, et al. Online decoupling control of neural network in a multi-variable fermentation process[J]. Information and Control, 2013, 42(3): 341–350. |
| [25] |
贺益康, 胡家兵, 徐烈.
并网双馈异步风力发电机运行控制[M]. 北京: 中国电力出版社, 2012.
He Y K, Hu J B, Xu L. Operation and control of grid-connected DFIG-based wind power generators[M]. Beijing: China Electric Power Press, 2012. |