



2. 中国科学院机器人与智能制造创新研究院, 辽宁 沈阳 110016;
3. 中国科学院大学, 北京 100049
2. Institutes for Robotics and Intelligent Manufacturing, Chinese Academy of Sciences, Shenyang 110016, China;
3. University of Chinese Academy of Sciences, Beijing 100048, China
0 引言
表面肌电信号(sEMG,surface electromyography)是肌肉收缩时多个活跃运动单元发出的动作电位序列经由脂肪组织容积滤波后,在皮肤表面叠加的结果,它直接反映人体的运动意图[1].基于表面肌电信号的动作识别是人机交互的重要组成部分,已经被广泛应用于康复外骨骼机器人、智能假肢、游戏娱乐等各个领域[2-3].基于肌电识别的人机交互系统的主要流程包括[4-6]:1)根据要识别的动作类型和数量对每个受试者按照经验确定电极粘贴的位置和数量,然后调整电极到适当的粘贴位置[7]. 2)对采集到的肌电信号进行滤波、标签修正等预处理,然后在一个时间窗内提取有限的时域特征、频域特征或时频域特征. 3)选择分类模型对特征数据进行训练得到离线模型,然后评估测试集正确率和在线控制精度. 4)同一受试者一段时间后再次启动肌电识别系统时,根据第1步电极位置的记录情况粘贴电极,利用第3步训练好的离线模型在线预测动作类别,然后将其转换成指令控制机器人的运动[8-9].为了提高肌电识别的正确率,很多研究人员致力于肌电识别中的特征工程工作,主要提取肌电信号的时域特征(均方根、波形长、过零点数、自回归系数等)、频域特征(中值频率、均值频率、功率谱系数等)和时频域特征(短时傅里叶变换系数、小波变换系数等)等[10-12].还有一部分研究人员倾向于选择更好的算法模型来提高动作识别的准确率和系统的鲁棒性,例如支持向量机、随机森林、多层感知器、梯度提升树模型以及各种改进的模型等[13-17].
除了提取较好的特征和选择较好的模型可以提高肌电识别的正确率之外,在肌电数据获取方面,在不同的肌肉位置处粘贴电极和选择不同数量的电极通道也会对动作的识别率产生较大的影响. Lu等根据经验将7块电极放置在前臂肌肉的解剖位置,然后将电极轻微地移动到几个不同的附近位置,多次调整后将电极确定在最大信噪比处[7]. Manfredo等利用密集采样方法和解剖定位策略粘贴较多的电极,在肱桡关节的前臂周围等距离放置一圈共8个电极,根据经验在指浅屈肌、指浅伸肌处、肱二头肌、肱三头肌处再分别放置一个电极[18].上述方法和其他一些类似的方法都是通过在多个肌肉位置处粘贴多个电极来保证动作的识别正确率,而没有找出每个受试者与相应动作类型最相关的肌肉位置,会导致一些冗余的通道信息.在一段时间后当受试者使用训练好的模型进行在线控制实验时,需要按照之前记录的电极位置粘贴电极,并将每个电极调整到合适的肌肉位置,粘贴的电极数量越多,每次在线控制实验都需要重复的耗费较多的时间用于粘贴电极到合适的位置上,系统的实用性和使用效率降低.另外电极潜在的脱落、损坏等问题也会不同程度地降低系统的鲁棒性[19-20].对于事先定义好的一些动作类型,不同电极通道组合下的动作识别率会有明显的差异.为了提高肌电识别系统的使用效率、实用性和鲁棒性,本文提出一种最优通道组合选择方法,用于选择对当前手部动作识别率贡献比最大的肌肉位置组合,能够以更少的电极通道数达到较好的识别正确率.
传统的肌电识别是手动提取每个通道肌电信号的多个特征,然后组合成特征向量输入给算法模型,然而在进行通道选择时,总特征数会随着通道数量的减少而成比例的减少.因此,本文引入梯度提升树(GBDT)模型利用少量手动提取的特征自动生成大量新的隐含特征(生成的新特征依赖于动作类别数,而不依赖于电极通道数)并且能够在通道选择时大幅度降低总特征数减少的比例,从而提高动作识别的正确率.本文的主要工作是:首先根据经验在多个肌肉解剖位置处粘贴电极,提取每个通道肌电信号的常用特征用于训练第一个梯度提升树模型;然后利用训练好的梯度提升树模型生成肌电信号潜在的隐含特征;最后将原有特征和新特征组合起来训练第二个梯度提升树模型,用于遍历所有通道组合下的动作识别正确率,从而选择出最优的通道组合.实验结果表明,对于本文定义的8个手部动作,4个通道数量下的最优通道组合的识别正确率与6个通道的识别正确率基本相同.因此,在保证较高识别率的基础上,利用所提的方法有利于减少电极粘贴的数量,从而提高肌电识别系统实际使用过程中的使用效率、实用性和鲁棒性.
1 肌电数据采集与处理 1.1 实验数据采集在本文实验中所有的肌电信号数据均来自三位受试者的右前臂.所有受试者均为身体健康的男性,年龄22岁~28岁,身高168 cm~182 cm,体重68kg~81 kg.所有受试者均是自愿参加此实验数据采集,且采集数据前12个小时内没有剧烈运动,并在采集实验前让受试者熟悉整个实验流程.本文考虑识别8种常见的手部动作:握拳、伸掌、腕外展、腕内收、伸食指和中指、伸中指无名指和小指、伸拇指和食指、伸拇指和小指,如图 1所示.

|
| 图 1 识别的8种手部动作 Fig.1 The eight kinds of hand motions that were recognized in the paper |
使用肌电信号采集系统(Trigno Delsys,美国)采集sEMG,该设备是具有16个采集通道的无线传输干电极,2 000 Hz采样频率.在电极粘贴之前,用酒精擦拭皮肤表面,然后将6个电极依次贴在前臂的桡侧腕短伸肌(ectensor carpi radialis,ECR)、桡侧腕屈肌(flexor carpi radialis,FCR)、肱桡肌(brachioradialis,B)、尺侧腕伸肌(extensor carpi ulnaris,ECU)、指伸肌(extensor digitorum,ED)、指浅屈肌(flexor digitorum superficialis,FDS)处,这6个电极采集到的肌电信号数据依次代表 6个通道{C1,C2,C3,C4,C5,C6},如图 2所示.

|
| 图 2 选取的肌肉位置及分布(其中Ci(i=1,2,3,4,5,6)表示第i通道电极) Fig.2 The selected muscles and the placement of electrodes(Ci(i = 1, 2, 3, 4, 5, 6)represents the ith channel electrode) |
每个受试者静坐于座椅上,由采集程序在电脑屏幕中显示的图片引导受试者做出相对应的手部动作.要求受试者每个动作用最大的力维持6 s,然后休息4 s,每个动作循环6次,依次完成8个动作的采集,采集过程如图 3所示.

|
| 图 3 受试者数据采集过程 Fig.3 Data Acquisition process of subject |
为了提高手部动作识别的正确率,需要对采集到的原始肌电信号进行一系列的预处理操作.表面肌电信号受50 Hz工频噪声干扰的影响较大,虽然采集设备都带有硬件陷波器,但仍然存在一部分干扰,在数据预处理过程中采用IIR数字陷波器对50 Hz工频噪声进行二次去除[21].然后再采用10 Hz~500 Hz的Butterworth带通滤波器保留肌电信号的主要能量[22].
采集到的肌电信号是由受试者根据电脑屏幕中的图片引导做出相应的动作,受试者的精神不集中、反应时间差等因素会导致程序时间戳对应的动作类别标签与真实的动作类别标签不一致.真实的类别标签总是滞后于程序标注的类别标签.针对类别标签不一致的问题,提出了最大面积法进行标签修正,具体的操作步骤如下:1)对n个通道的肌电信号取绝对值然后求和,得到每一时刻采集到的总能量(幅值的绝对值之和). 2)从采集的0时刻开始,每隔0.5 s(1 000个采样点)求出接下来5 s(10 000个采样点)内的能量和. 3)求出每10 s(20 000个采样点)内的能量和最大值,即为每次从休息状态到动作状态的切换时刻的起始点. 4)从每次切换时刻的起始点开始的5 s(10 000个采样点)内的数据作为当前时刻动作标签的对应数据,其余时刻的数据作为休息状态.前两个动作类别的标签修正如图 4所示,其中红框内的数据为原始标签数据,黑框内的数据为标签修正后的数据,修正后的动作数据全部在动作持续的时间范围内.

|
| 图 4 前两个动作的肌电原始数据与类别标签修正 Fig.4 The original EMG data of the first two movements and corrected category label |
对于预处理后的肌电信号采用100 ms的时间窗和50 ms的增量窗进行特征提取,如图 5所示.时间窗加增量窗的特征提取是一种有效的数据增强方法,能够保证提取到的特征的连续性和类别输出的稳定性.在每个时间窗内,从每个通道提取5个常用的肌电特征,包括均方根(root mean square,RMS)、波形长(waveform length,WL)、零穿越次数(zero crossings,ZC)、斜率符号变化次数(slope sigh changes,SSC)、平均绝对值(mean absolute value,MAV).所有通道的全部特征共同构成一个样本,用于接下来的GBDT模型新特征生成和手部动作识别.

|
| 图 5 肌电信号的时间窗和增量窗 Fig.5 The time window and increase window of EMG |
在基于肌电信号控制机器人运动的实际使用中,会尽可能粘贴较多的肌电电极,从而提高手部动作识别率.然而粘贴较多的电极可能会引入更多的噪声并且花费较多调整电极位置的时间.另外,有些肌肉位置采集到的肌电信号对要识别的手部动作贡献并不大,会造成信息的冗余.因此,在保证一定手部动作识别正确率的基础上,选择最优的通道组合,尽可能少的粘贴电极,从而简化使用过程中的操作.针对不同的手部动作,通过离线训练模型选择最优的肌肉位置组合,保存最优的肌肉位置和训练好的模型用于在线控制.离线选择最优通道组合的步骤如下:1)定义要识别的手部动作,粘贴多个电极采集肌电信号. 2)遍历所有可能的通道组合,并提取特征训练GBDT模型用于生成新特征. 3)将提取的特征和新特征组合起来训练第二个GBDT模型. 4)根据识别正确率和通道数的大小,选择出最合适的通道数k及其对应的通道组合方式,具体选择规则如下式(1)所示.

|
(1) |
其中,n表示电极通道总数,accuracyk,(k=1,2,…,n)表示k个通道组合下的最好识别率,ε表示阈值,一般取1%~3%.实际在线控制时,只在最优选择的肌肉位置处粘贴电极,根据训练好的模型生成新特征,并给出预测结果用于控制机器人的运动.系统的整体框架如图 6所示.

|
| 图 6 离线选择通道组合与在线控制的系统流程图 Fig.6 Flow chart of off-line selection channel combination and on-line control |
梯度提升树(GBDT)是集成学习算法的一种,为所有样本都设置一个对应的系数,假设某个样本判别正确则下一轮减小该样本的系数. GBDT的分类结果由各个基分类器采用线性加权方式进行决策,GBDT算法的学习过程如图 7所示.

|
| 图 7 GBDT算法的学习过程 Fig.7 The learning process of the GBDT algorithm |
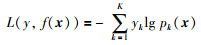
前轮强学习器用ft-1(x)表示,本轮学习器用ht(x)表示并且本轮损失函数用L(y,ft(x))=L(y,ft-1(x)+ht(x))表示.利用肌电特征向量x作为GBDT模型的输入,多个动作类别作为输出(用数字k表示类别数).利用对数似然函数作为模型训练的损失函数即动作类别的预测值和实际动作类别的差值,损失函数的表达式为
|
(2) |
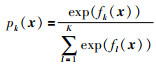
如果肌电信号样本对应的动作输出为k,则yk=1,第k个动作类别pk(x)的概率表达式为
|
(3) |
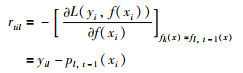
在迭代过程中,先计算出第t轮的第i个肌电信号样本对应动作类别l的负梯度误差如式(4)所示:
|
(4) |
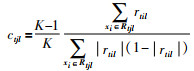
利用(xi,rtil)(i=1,2,…,m)拟合CART树,对应的叶节点区域为Rtj(j=1,2,…,J),其中J为回归树t的叶节点数.对于生成的决策树,各个叶节点的最佳残差拟合值如式(5)所示:
|
(6) |
由于(5)式比较难优化,一般使用近似值(6)式来代替,然后更新强学习器公式为

|
(7) |
其中,I(x ∈Rtj)表示肌电样本x在第t颗决策树的第j个叶子节点,令f0(x)=0,最终的强学习器表达式为

|
(8) |
本文利用GBDT模型自动生成依赖于动作类别数而非电极通道数的新特征,在通道选择时可以降低总特征数减少的比例. GBDT构建新特征的核心思路是利用原有的肌电信号特征训练多棵CART树,然后通过每棵树的叶节点构建特征.把构建好的特征与以前的特征拼接起来重新学习一个GBDT模型用于判别手部动作类型.构造的新特征向量每个元素的取值都是0或1,对应于CART回归树的叶节点.当一个样本点落在某棵树的叶节点上,那么在新特征向量中这个叶节点对应的元素值为1,其余元素为0.新特征向量的长度等于所有CART回归树包含的所有叶节点数之和.
利用GBDT算法构造新特征,并识别动作类型的流程如图 8所示.这里假设第一个GBDT模型训练好了两棵CART回归树.对于一个输入样本点,假设它在第一棵树最后落在其中的第二个叶节点,而在第二棵树里最后落在其中的第一个叶节点.那么新特征向量为[0, 1, 0, 1, 0].在本文实验中,每个通道肌电信号提取了5个时域特征(RMS,WL,ZC,SSC,MAV),在遍历所有通道组合时,假设选择k个通道组合,则肌电信号输入特征维度为5k.在构造新特征的GBDT模型中,训练12棵CART回归树用于构造新特征.为了防止叶子节点数过多而导致过拟合,需要在构建GBDT模型时对每棵树的叶子节点数做约束,根据动作类别数限定不多于8个叶子节点,最终构造的新特征向量的维度数是96.将新构造的特征与原有特征组合起来,得到维度为5k+96的特征向量,用该特征向量再训练一个GBDT模型用于判别动作类型.各个通道数量下的原始特征数、组合特征数以及占全部通道特征数的比例如表 1所示.为了防止过拟合,第二个GBDT模型使用200棵CART回归树,树的最大深度限制为7.每棵树的叶子节点数限制不超过12,内部节点再划分时所需最小样本数设置为2,每个叶子节点最少样本数为2,如果某个叶子节点样本数少于2个采用剪枝处理.

|
| 图 8 GBDT构造新特征和动作分类的简化示意图 Fig.8 Simplified schematic map of GBDT constructing new features and movements classification |
| 通道数 | 原始 特征数 |
占全部特征 比例/% |
组合 特征数 |
占全部特征 比例/% |
| 6 | 30 | 100 | 126 | 100 |
| 5 | 25 | 83.3 | 121 | 96.0 |
| 4 | 20 | 66.7 | 116 | 92.1 |
| 3 | 15 | 50 | 111 | 88.1 |
| 2 | 10 | 33.3 | 106 | 84.1 |
| 1 | 5 | 16.7 | 101 | 80.2 |
在本文实验中,选择SVM算法和GBDT算法与双GBDT算法(图 8所示)进行比较.其中GBDT算法与双GBDT算法中的第二个GBDT设置一致. SVM算法选用高斯核函数,核函数系数λ和惩罚系数C都使用网格搜索法选择最优的超参数.每组实验都是将6次重复数据提取到的特征样本随机分割出80%作为训练集,20%作为测试集,重复3次实验取平均结果,各个算法和通道组合的识别率比较使用的是相同的训练集进行模型训练和相同的测试集进行评估.本文所有的数据预处理、算法模型调试和结果分析都由Matlab和Python完成.从三名受试者的多组通道组合数据中随机抽取了8组数据(如S1受试者的C124组合、S2受试者的C15组合等)用于算法比较,基于SVM算法、GBDT算法、双GBDT算法的手部动作识别结果如图 9所示.可以看出双GBDT算法的识别结果大多高于SVM和GBDT算法.接下来的手部动作识别结果均由双GBDT算法调试得出.

|
| 图 9 双GBDT算法、GBDT算法和SVM算法识别结果比较 Fig.9 Comparison of Recognition Results of Double GBDT, GBDT and SVM Algorithm |
对每个受试者采集到的全部通道(6个)数据进行组合,其中单个通道、5个通道各有6种组合,2个通道、4个通道各有15种组合,3个通道有20种组合,6个通道只有一种组合,总共有63种通道组合.使用前文的双GBDT算法对这63种通道组合数据依次进行模型训练,得出各种组合情形下的手部动作识别率,保存各个通道数量下的最优通道组合及其模型.各个通道数量下的最优通道组合及其识别正确率如表 2所示,S1受试者表现最好的通道组合依次是C1、C36、C123、C3456、C12356;S2受试者表现最好的通道组合依次是C6、C14、C123、C1234、C23456;S3受试者表现最好的各种数量通道组合依次是C6、C15、C126、C1245、C12356.由此可见,对于相同的手部动作进行识别时,不同的受试者识别率最高的通道组合情形是不同的.依靠经验在几处肌肉位置粘贴电极进行手部动作识别不是完全可靠的,需要对不同的通道组合进行分析,从而选定合适的肌肉位置.
| 通道数 | S1通道组合 | S1识别率/% | S2通道组合 | S2识别率/% | S3通道组合 | S3识别率/% |
| 1 | C1 | 75.08±2.11 | C6 | 70.98±2.13 | C6 | 78.55±2.45 |
| 2 | C36 | 95.27±1.42 | C14 | 93.01±1.34 | C15 | 92.69±2.71 |
| 3 | C123 | 97.48±1.11 | C123 | 95.21±1.17 | C126 | 98.05±0.34 |
| 4 | C3456 | 98.74±0.22 | C1234 | 96.48±0.11 | C1245 | 99.00±0.77 |
| 5 | C12356 | 98.74±0.60 | C23456 | 96.48±1.90 | C12356 | 98.68±1.34 |
| 6 | C123456 | 98.74±0.12 | C123456 | 97.11±0.23 | C123456 | 98.68±1.08 |
为了更加直观地比较不同的通道组合数据在动作识别时的差异性,对8个动作类别的样本分布进行分析.由于每个样本的特征维度很高并且每个特征与动作类别一般是非线性关系.因此引入T-SNE(t-distributed stochastic neighbor embedding)算法将高维的肌电特征降低到二维并进行可视化.
T-SNE的基本思想是若两个数据在高维空间中是相似的,那么降到低维空间时它们之间的距离应该很近.使用条件概率来描述两个数据之间的相似性,假设,xi,xj是高维空间中的两个点,以点xi为中心构建方差为σi的高斯分布,使用pj|i表示xj是xi邻域的条件概率. pj|i的定义如下式(9)所示.假映射到低维空间后对应yi,yj,在低维空间中引入自由度为1的t分布,yj是yi邻域的条件概率为qj|i,定义如下式(10)所示.在高维空间中,如果考虑xi与其他所有点之间的条件概率,那么会构成一个条件概率分布Pi,同样在低维空间也会有与之对应的条件概率分布Qi.使用KL散度(相对熵)衡量两个条件概率分布之间的差异,则需要优化的目标函数如下式(11)所示.
|
(10) |

|
(11) |
根据T-SNE算法对受试者S3在各个通道数量下的最好的通道组合数据和最差的通道组合数据进行二维可视化,如图 10所示.可以看出3Y、4Y、5Y的动作样本可分性均比4N、5N的动作可分性好,且4Y的可分性略优于3Y、5Y,3Y和5Y的可分性基本相同.因此可以在保证较好的样本可分析和较高的动作识别率的基础上,通过选择最优的通道组合来减少电极数量的粘贴,从而提高系统的实用性和鲁棒性.

|
| 图 10 受试者S3在各个数量通道组合下的特征数据降维可视化结果(其中iN,iY,(i=2,3,4,5)表示通道数量,Y表示最好的通道组合,N表示最差的通道组合) Fig.10 Two-dimensional visualization of S3 subject under multiple channels combination(iN, iY(i = 2, 3, 4, 5) represents the numbers of channel, Y represents the best combination of channels, N represents the worst channel combination) |
将3个受试者在每个通道数中最差识别正确率、最好识别正确率和平均识别正确率画成折线图,如图 11所示.尽管每个受试者在各个数量通道下表现最好的通道组合不同,但是都呈现出相同的规律:识别正确率的增长速度随着通道数量的增加而减小,到4个通道数量时识别率提高很少.对于S1受试者,两个通道的最好识别率明显高于3个通道的最差识别率,略高于3个通道的平均正确率和4个通道的最差识别率. 3个通道的最好识别率略高于4个通道的平均识别率,4个通道的最好识别率与5个通道的最高识别率和6个通道的识别率几乎相同.由此可见,对于S1受试者可以优先选择4个通道的最好识别正确率对应的C3456通道,在实际使用肌电信号控制机器人时,也可以选用3个通道的最好识别正确率对应的C123通道.对于S2受试者同理分析,可以优先选择4个通道的最好识别率对应的C1234通道和3个通道的最好识别正确率对应的C123通道.对于S3受试者,优先选择4个通道的最好识别率对应的C1245通道和3个通道的最好识别正确率对应的C126通道.

|
| 图 11 三位受试者在各个通道数量下最好、平均、最差的组合对应的动作分类结果 Fig.11 The best, average and worst movements classification results of three subjects under multiple channel combinations |
为了验证在线控制时的精度,采用4个通道数下的最优通道组合对每位受试者重新粘贴电极进行在线控制实验,如图 12所示.每位受试者对每个动作随机做10次,8个手部动作类型共做80次动作.连续两次识别结果一致时机器手执行运动命令,机器手运动完成后测试下一个随机动作,机器手正在运动时不接受命令.用机器手正确跟随次数除以动作总次数来衡量在线控制精度,三位受试者在最优通道组合时的平均控制精度为95. 83%.从在线控制精度可以看出,4个通道数下的最优通道组合能实现机器手的准确跟随控制.机器手跟随手部动作的运动过程流畅,系统延时小于300 ms,能实现实时的动作跟随.因此,选择最优的通道组合能在保证较高识别率的基础上减少电极的粘贴数量,从而提高肌电识别系统的使用效率、实用性和鲁棒性.

|
| 图 12 在线控制实验 Fig.12 Online control experiment |
本文主要解决的是肌电识别问题中,在保证较高动作识别率的基础上,如何选择最合适的肌肉位置组合,从而减少电极的使用,提高实际操作过程的使用效率和系统的鲁棒性.首先依次遍历所有通道组合的肌电信号,利用提取到的原始特征训练一个GBDT模型用于生成新的隐含特征.然后将原有特征和新特征组合起来再训练一个GBDT模型,用于评测各个通道组合下的识别率,从而选择最优的通道组合.
最后的实验结果表明,对于定义好的8个手部动作,3个通道和4个通道中的最好组合情况均能够达到较高的识别正确率,3位受试者4个通道组合下的最好识别率分别为98. 74±0.22%,96. 48±0.11%,99. 00±0.77%,与6个通道的识别正确率基本相同.然而不同受试者的最优通道组合是不同的,依靠经验在几处肌肉位置粘贴电极进行动作识别不是完全可靠的,所以需要对不同的通道组合进行分析,从而选定合适的肌肉位置.在线控制实验中,最优通道组合的平均控制精度为95. 83%,能实现对机器手准确实时的控制.因此,选择最优的通道组合能实现较高的离线识别率和在线控制精度,并且能减少肌电电极的使用,从而提高肌电识别系统的实用性、使用效率和鲁棒性.在后续的肌电识别研究工作中,可以先采用本文的方法选择较好的肌肉位置粘贴电极,从而提高识别问题中的基准.也为后续分析不同肌肉之间肌电信号的相关性奠定了良好的基础.
| [1] |
丁其川, 赵新刚, 韩建达, 等.
基于肌电信号容错分类的手部动作识别[J]. 机器人, 2015, 37(1): 9–16.
Ding Q C, Zhao X G, Han J D, et al. Recognizing hand motions based on fault-tolerant classification with EMG signals[J]. Robot, 2015, 37(1): 9–16. |
| [2] |
侯增广, 赵新刚, 程龙, 等.
康复机器人与智能辅助系统的研究进展[J]. 自动化学报, 2016, 42(12): 1765–1779.
Hou Z G, Zhao X G, Chen L, et al. Recent advances in rehabilitation robots and intelligent assistance systems[J]. Acta Automatica Sinica, 2016, 42(12): 1765–1779. |
| [3] | Ding Q C, Han J D, Zhao X G. Continous estimation of human multi-joint angles from sEMG using a state-space model[J]. IEEE Transactions on neural systems and rehabilitation engineering, 2017, 25(9): 1518–1528. DOI:10.1109/TNSRE.2016.2639527 |
| [4] | Ahsan M R, Ibrahimy M I, Khalifa O O, et al. EMG signal classification for human computer interaction:A review[J]. European Journal of Scientific Research, 2009, 33(3): 480–501. |
| [5] | Young A J, Smith L H, Rouse E J, et al. Classification of simultaneous movements using surface EMG pattern recognition[J]. IEEE Transactions on Biomedical Engineering, 2013, 60(5): 1250–1258. DOI:10.1109/TBME.2012.2232293 |
| [6] |
丁其川, 熊安斌, 赵新刚, 等.
基于表面肌电的运动意图识别方法研究及应用综述[J]. 自动化学报, 2016, 42(1): 13–25.
Ding Q C, Xiong A B, Zhao X G, et al. A review on researches and applications of sEMG-based motion intent recognition methods[J]. Acta Automatica Sinica, 2016, 42(1): 13–25. |
| [7] | Lu Z Y, Tong K Y, Zhang X, et al. Myoelectric pattern recognition for controlling a robotic hand:A feasibility study in stroke[J]. IEEE Transactions on Biomedical Engineering, 2019, 66(2): 365–372. DOI:10.1109/TBME.2018.2840848 |
| [8] | Li G L, Schultz A E, Kuiken T A. Quantifying pattern recognition-based myoelectric control of multifunctional transradial prostheses[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2010, 18(2): 185–192. DOI:10.1109/TNSRE.2009.2039619 |
| [9] | Liu J, Zhou P. A novel myoelectric pattern recognition strategy for hand function restoration after incomplete cervical spinal cord injury[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2013, 21(1): 96–103. DOI:10.1109/TNSRE.2012.2218832 |
| [10] | Phinyomark A, Phukpattaranont P, Limsakul C. Feature reduction and selection for EMG signal classification[J]. Expert Systems with Applications, 2012, 39(8): 7420–7431. DOI:10.1016/j.eswa.2012.01.102 |
| [11] | Venugopal G, Navaneethakrishna M, Ramakrishnan S. Extraction and analysis of multiple time window features associated with muscle fatigue conditions using sEMG signals[J]. Expert Systems with Applications, 2014, 41(6): 2652–2659. DOI:10.1016/j.eswa.2013.11.009 |
| [12] | Guo S, Pang M, Gao B, et al. Comparison of sEMG-Based feature extraction and motion classification methods for upper-limb movement[J]. Sensors, 2015, 15(4): 9022–9038. DOI:10.3390/s150409022 |
| [13] | Gijsberts A, Atzori M, Castellini C, et al. Movement error rate for evaluation of machine learning methods for sEMG-based hand movement classification[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2014, 22(4): 735–744. DOI:10.1109/TNSRE.2014.2303394 |
| [14] | Naik G, Altimemy A, Nguyen H. Transradial amputee gesture classification using an optimal number of semg sensors:An approach using ICA clustering[J]. IEEE Transactions on Neural Systems&Rehabilitation Engineering, 2016, 24(8): 837–846. |
| [15] |
刘磊, 杨鹏, 刘作军, 等.
采用核主成分分析和相关向量机的人体运动意图识别[J]. 机器人, 2017, 39(5): 661–669.
Liu L, Yang P, Liu Z J, et al. Human motion intent recognition based on kernel principal component analysis and relevance vector machine[J]. Robot, 2017, 39(5): 661–669. |
| [16] | Aung Y, Aljumaily A. sEMG based ANN for shoulder angle prediction[J]. Procedia Engineering, 2012, 41: 1009–1015. DOI:10.1016/j.proeng.2012.07.276 |
| [17] |
郭欣, 王蕾, 宣伯凯, 等.
基于有监督Kohonen神经网络的步态识别[J]. 自动化学报, 2017, 43(3): 430–438.
Guo X, Wang L, Xuan B K, et al. Gait recognition based on supervised Kohonen neural network[J]. Acta Automatica Sinica, 2017, 43(3): 430–438. |
| [18] | Manfredo A, Matteo C, Henning M. Deep Learning with Convolutional neural networks applied to electromyography data:A resource for the classification of movements for prosthetic hands[J]. Frontiers in Neurorobotics, 2016: 10. |
| [19] | Duan F, Dai L. Recognizing the gradual changes in sEMG characteristics based on incremental learning of wavelet neural network ensemble[J]. IEEE Transactions on Industrial Electronics, 2017, 64(5): 4276–4286. DOI:10.1109/TIE.2016.2593693 |
| [20] | Chen X, Zhang D, Zhu X. Application of a self-enhancing classification method to electromyography pattern recognition for multifunctional prosthesis control[J]. Journal of Neuroengineering and Rehabilitation, 2013, 10(44): 1–13. |
| [21] | Li L, Wang J H, Ban S. A design method for IIR and FIR digital notch filter used to sEMG[J]. Applied Mechanics and Materials, 2012, 263(266): 184–187. |
| [22] | Potluri C, Anugolu M, Schoen M P, et al. Hybrid fusion of linear, non-linear and spectral models for the dynamic modeling of sEMG and skeletal muscle force:An application to upper extremity amputation[J]. Computers in Biology & Medicine, 2013, 43(11): 1815–1826. |