



0 引言
随着系统可靠性和安全性的要求越来越高,故障诊断与容错控制也成为控制领域一个重要的研究方向[1-4].执行器和传感器作为系统的执行机构和测量元件,对于系统的稳定和性能有着重要的作用,一旦两者发生故障,将会导致系统性能降低甚至破坏系统稳定性.因此对系统执行器和传感器故障进行故障诊断与容错控制具有重要的研究意义与应用价值[5-7].
目前,容错控制可以分为主动容错控制[8-10]和被动容错控制[11-13].主动容错控制是在获取故障信息的基础上,设计容错控制器来保证系统的性能和稳定性;被动容错控制是采用控制器使得闭环系统不敏感特定的故障,保持系统的稳定性和性能[5].针对四旋翼飞行器发生的执行器故障,Merheb等利用滑模控制设计了一种被动容错控制器[11],使得系统在特定故障下仍然处于稳定状态,针对系统的传感器故障,Yang等利用LQG使得系统在故障情况下保持稳定[12],针对一类存在不确定的线性系统存在的执行器故障,Li等利用自适应控制方法实现了容错控制[13],但是上诉文献只能处理特定的故障,而且无法获得故障信息.针对风力发电系统的传感器故障,沈艳霞等分别利用滑模控制和未知输入观测器[3-4],实现了传感器的故障估计,针对执行器出现的增益缺失故障,Zhang提出了一种自适应卡尔曼滤波算法,将卡尔曼滤波与最小二乘法相结合,实现了执行器的故障估计[14],随后针对动态系统的执行器和传感器故障,赵黎丽等设计了一种带有遗忘因子的自适应观测器[15],在白噪声的干扰下实现了执行器和传感器故障的同步估计,但是上诉文献只获得了系统的故障估计值,没有利用故障信息对系统进行修正,实现容错控制.针对导弹的姿态控制系统存在的传感器故障[8],曹祥宇等分别利用数值微分器和数值积分器对故障信号进行重构,在故障状态下利用重构信号代替传感器信号,实现主动容错控制.针对系统的执行器故障,Zhang和Jiang提出了一种自适应观测器[9-10],利用得到系统状态和故障,进行故障调节. Gao等将传感器故障等效为系统的状态,建立了一种增广模型,设计观测器,对系统状态和故障进行估计,通过状态估计值设计容错控制器,对系统输出进行补偿,实现传感器故障估计与容错控制[16].文[8-10, 16]虽然利用故障信息实现了主动容错控制,但是没有同时考虑执行器和传感器故障以及系统存在的噪音干扰,而在实际系统中,噪音的存在不可避免.
基于以上分析,本文将在文[14]提出的自适应卡尔曼滤波基础上,对系统执行器和传感器的故障估计与容错控制问题进行研究.首先,对文[14]提出的自适应卡尔曼滤波进行改进,在白噪声干扰下实现执行器和传感器故障的同步估计.然后根据得到的故障信息,基于动态输出反馈和圆盘稳定定理配置闭环系统极点,使得系统保持稳定并使得系统响应恢复正常状态.最后应用飞行控制系统模型对提出的算法进行了仿真验证.
1 问题描述考虑如下线性离散系统:

|
(1) |

|
(2) |
其中,x (k)∈Rn、y (k)∈Rm和u (k)∈Rl分别为系统的状态、系统的输出和系统的输入,A ∈Rn×n、B ∈Rn×l、C ∈Rm×n、E1∈Rn×q1和F1∈Rm×q2为系数矩阵,fa∈Rq1、fs∈Rq2分别为执行器和传感器的故障向量,w (k)∈Rn和v (k)∈Rm都是均值为0且相互独立的高斯白噪声序列,其协方差矩阵为Q ∈Rn×n和R ∈Rm×m.
令

|
则系统(1)、(2)为

|
(3) |

|
(4) |
本文的研究目的是改进自适应卡尔曼滤波器,实现执行器和传感器故障的同步估计,然后根据得到的故障信息,设计容错控制器使系统响应恢复到正常状态,其控制框图如图 1所示.

|
| 图 1 系统容错控制框图 Fig.1 The block diagram of system fault tolerance control |
本节将对文[14]设计的自适应卡尔曼滤波进行改进,实现系统执行器和传感器故障的同步估计,同时通过李亚普诺夫函数分析改进后的自适应卡尔曼的收敛性.
2.1 改进自适应卡尔曼滤波设计为了对自适应卡尔曼滤波进行改进,做出如下假设:
假设 1 矩阵[A C]完全可观,[A Q1/2]完全可控,K (k)为卡尔曼滤波增益,则矩阵η (k)满足:

|
(5) |
η (k)是指数收敛[14].
假设 2 故障f (k)为缓变故障,满足

|
(6) |
为了对系统故障进行估计,针对系统(3)、(4)设计改进自适应卡尔曼滤波器如下:

|
(7) |

|
(8) |

|
(9) |
其中,γ (k)、Γ (k)为误差增益矩阵,
|
(10) |
定义系统误差:

|
(11) |
|
(12) |

|
(13) |
由式(3)、式(7)、式(9)、式(11)得:
|
(14) |
由式(13)、式(14)得:
|
(15) |
令

|
(16) |
将式(16)代入式(15)得:

|
(17) |
由式(17)得:

|
(18) |
根据式(5),可知Eη (k)是指数收敛于零.
由式(8)、式(9)得:
|
(19) |
其中,Δ f (k)= f (k+1)-f(k).
由假设2知Δf(k)→0,则将式(13)代入式(19)得:
|
(20) |
其中,

|
(21) |
由于Ev (k)=0,当k→∞时,Eη (k)=0,所以当k→∞时

|
(22) |
如果存在矩阵Γ (k),使得E
为了证明改进自适应卡尔曼滤波器的收敛性,需要满足如下假设.
假设 3 假设在E、F的激励下,存在常数h>0,α>0,对于k≥0,矩阵Ω (k)满足:

|
(23) |
定理 1 假设存在矩阵Γ (k)满足:

|
(24) |
|
(25) |

|
(26) |
其中,λ∈(0,1)为遗忘因子,则系统状态误差均值
证明 由假设3可知,在初值条件S (0)=ω I (ω>0),矩阵S (k)是严格正定的[17].
记M (k)= S-1(k),定义李亚普诺夫函数

|
(27) |
将式(22)代入式(27)得到
|
(28) |
其中,

|
(29) |
由于Λ (k)是正定矩阵,则Ξ (k)也是正定矩阵,所以
|
(30) |
由式(30)可以知道,V (k)是指数趋近于零,由于矩阵M (k)是严格正定的,所以E

|
(31) |
所以
根据改进自适应卡尔曼滤波获得的故障信息,下面将设计容错控制器使得系统保持稳定.首先给出如下假设:
假设 4 rank(B E)=rank(B)=l,则存在非零矩阵E,使得E = BE.定义广义逆矩阵B*=(BT B)-1 BT,则B = BB* B,所以
|
(32) |
假设 5 [18](圆盘稳定定理)对于给定的圆盘区域D(α,τ)(α为圆盘中心,τ为圆盘半径)和矩阵A ∈Rn×n,如果存在对称正定矩阵P ∈Rn×n,满足:
|
(33) |
则A的特征值位于圆盘区域D(α,τ).
基于故障信息,设计如下输出反馈容错控制器:

|
(34) |
|
(35) |
其中,Ak∈Rn×n、Bk∈Rn×m、Ck∈Rl×n、Dk∈Rl×m为系统矩阵,r (k)∈Rl为参考输入.
假设参考输入r (k)=0,则闭环控制系统的状态方程以及补偿输出为

|
(36) |

|
(37) |
其中
|
由于k→∞,Eω (k)=0,则不考虑ω (k)项时,闭环控制系统(36)、(37)为

|
(38) |

|
(39) |
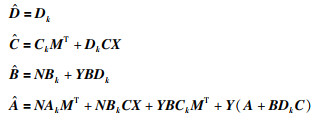
定理 2 对于给定的圆盘区域D(α,τ),如果存在对称正定矩阵X ∈Rn×n、Y ∈Rn×n以及矩阵



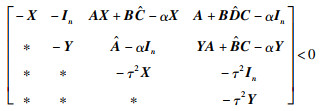
|
(40) |
则Ac的特征根位于圆盘区域D(α,τ),基于动态输出反馈的控制器的参数为
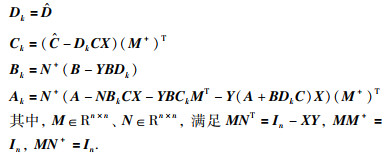
|
其中,M ∈Rn×n、N ∈Rn×n,满足MNT= In- XY,MM+= In,MN+= In.
证明 由假设5可知,要想Ac的特征值位于给定的圆盘区域D(α,τ),则存在矩阵正定对称P ∈R2n×2n满足:
|
(41) |
假设矩阵P为
|
其中,X,Y ∈Rn×n为对称正定矩阵,M,N,W,Z为合适维数的矩阵,由于PP-1= I2n,则满足:
|
则

|
在式(41)左乘diag(F1T F1T),右乘diag(F1 F1),同时令:
|
可以得到式(40).
为了得到容错控制器的参数Ak,Bk,Ck,Dk,需要对式MNT= In- XY进行求解,可以通过对矩阵In- XY进行三角分解得到M和N,即存在矩阵M1和N1,满足:
|
(42) |
令M = M1、N = N1T,则可以求得参数Ak,Bk,Ck,Dk.
注释 1 对于矩阵In- XY,文[19]采用的是奇异值分解,但是奇异值分解计算量较大.注意到
|
则矩阵I - XY为正定矩阵,满足三角分解要求分解矩阵非奇异条件,所以本文使用三角分解.
4 仿真分析本节将以飞机的横侧向运动为研究对象,对所提出的算法进行验证.对文[20]连续系统模型进行离散化,离散时间为0.1 s,其离散状态方程为
|
其中状态变量x (k)为侧滑角速度(rad/s)、滚转角速度(rad/s)、偏航角(rad)和滚转角(rad),控制输入u (t)为方向舵偏角(rad)和副翼偏角(rad).
选取圆盘D(0.5,0.5),根据定理2得到如下参数:
|
由假设4得:

|
仿真初值如下:
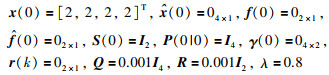
|
假设系统存在突变故障和缓变故障,故障表示如下[21]:
仿真 1 仅存在执行器故障
|
仿真 2 仅存在传感器故障
|
仿真 3 同时存在执行器和传感器故障
|
仿真结果如图 2~7,图 2、4和6表示执行器和传感器故障估计的误差曲线,图 3、5和7表示正常控制和容错控制时系统输出响应的误差曲线.

|
| 图 2 仿真1中故障估计的误差曲线 Fig.2 The curve of fault estimation error in simulation 1 |

|
| 图 3 仿真1中系统输出响应的误差曲线 Fig.3 The curve of system output in simulation 1 |

|
| 图 4 仿真2中故障估计的误差曲线 Fig.4 The curve of fault estimation error in simulation 2 |

|
| 图 5 仿真2中系统输出响应的误差曲线 Fig.5 The curve of system output in simulation 2 |

|
| 图 6 仿真3中故障估计的误差曲线 Fig.6 The curve of fault estimation error in simulation 3 |

|
| 图 7 仿真3中系统输出响应的误差曲线 Fig.7 The curve of system output in simulation 3 |
由图 2、4和6可知,对于存在的突变故障和缓变故障,本文所提出的算法可以对发生的执行器和传感器故障很好地进行同步估计,故障估计误差趋近于零,在k=200、400、600时,由于故障出现突变,使得估计值也出现突变,但是故障估计误差曲线很快趋近于零.由图 3、5和7可知,当k < 200系统无故障时,正常控制和容错控制系统输出响应都处于正常状态,而k>200系统执行器和传感器故障时,容错控制系统在k=200、400、600处输出响应会出现偏差,但是很快会恢复到正常状态,其它时刻均处于正常状态,而正常控制的系统在故障出现后输出响应出现较大误差.
5 结语本文针对离散系统发生的执行器和传感器故障,提出了一种基于动态输出反馈的故障估计与容错控制方法.在系统白噪声干扰下,该方法可以很好的对突变故障和缓变故障进行估计,利用估计的故障信息,基于动态输出反馈和圆盘稳定定理设计容错控制器,对闭环系统极点进行配置,保持系统稳定性同时使系统响应恢复到正常状态.飞行控制系统仿真表明:在故障条件下该方法可以很好的对执行器和传感器故障进行同步估计,同时对系统输出响应进行修正,实现容错控制.
| [1] | Wang H, Daley S. Actuator fault diagnosis:An adaptive observer-based technique[J]. IEEE Transactions on Automatic Control, 1996, 41(7): 1073–8. DOI:10.1109/9.508919 |
| [2] |
张柯, 姜斌.
基于降维观测器的非最小相位系统的快速故障估计[J]. 信息与控制, 2008, 37(4): 408–412.
Zhang K, Jiang B. Fast fault estimation of non-minimum phase systems based on reduced-order observer[J]. Information and Control, 2008, 37(4): 408–412. DOI:10.3969/j.issn.1002-0411.2008.04.005 |
| [3] |
沈艳霞, 杨雄飞, 赵芝璞.
风力发电系统传感器故障诊断[J]. 控制理论与应用, 2017, 34(3): 321–328.
Shen Y X, Yang X F, Zhao Z P. Sensor fault diagnosis for wind turbine system[J]. Control Theory&Applications, 2017, 34(3): 321–328. |
| [4] |
尹天骄, 沈艳霞.
基于未知输入观测器的风力机传动机构传感器故障重构方法[J]. 信息与控制, 2017, 46(6): 706–711.
Yin T J, Shen Y X. Fault reconstruction method for drive train system sensor fault of wind turbine using unknown input observer[J]. Information and Control, 2017, 46(6): 706–711. |
| [5] | Zhang Y, Jiang J. Bibliographical review on reconfigurable fault-tolerant control system[J]. Annual Reviews in Control, 2008, 32(2): 229–252. DOI:10.1016/j.arcontrol.2008.03.008 |
| [6] | Gao Z, Cecati C, Ding S X. A survey of fault diagnosis and fault-tolerant techniques-Part Ⅰ:Fault diagnosis with model-based and signal-based approaches[J]. IEEE Transactions on Industrial Electronics, 2015, 62(6): 3757–3767. DOI:10.1109/TIE.2015.2417501 |
| [7] | Hwang I, Kim S, Kim Y, et al. A survey of fault detection, isolation, and reconfiguration methods[J]. IEEE Transactions on Control Systems Technology, 2010, 18(3): 636–653. DOI:10.1109/TCST.2009.2026285 |
| [8] |
曹祥宇, 胡昌华, 马清亮.
考虑传感器故障的导弹姿态控制系统主动容错控制研究[J]. 控制与决策, 2012, 27(3): 379–382.
Cao X Y, Hu C H, Ma Q L. Research on active fault-tolerant control for sensor failures of missile attitude control systems[J]. Control and Decision, 2012, 27(3): 379–382. |
| [9] | Jiang B, Staroswiecki M, Cocquempot V. Fault accommodation for nonlinear dynamic systems[J]. IEEE Transactions on Automatic Control, 2006, 51(9): 1578–1583. DOI:10.1109/TAC.2006.878732 |
| [10] | Zhang K, Jiang B, Shi P. Observer-based integrated robust fault estimation and accommodation design for discrete-time systems[J]. International Journal of Control, 2010, 83(6): 1167–1181. DOI:10.1080/00207171003653029 |
| [11] | Merheb A R, Noura H, Bateman F. Design of passive fault-tolerant controllers of a quadrotor based on sliding mode theory[J]. International Journal of Applied Mathematics and Computer Science, 2015, 25(3): 561–576. DOI:10.1515/amcs-2015-0042 |
| [12] | Yang G, Wang J L, Soh Y C. Reliable LQG control with sensor failures[J]. IEE Proceedings-Control Theory and Applications, 2000, 147(4): 433–439. DOI:10.1049/ip-cta:20000499 |
| [13] | Li X, Yang G. Robust adaptive fault-tolerant control for uncertain linear systems with actuator failures[J]. IET Control Theory&Applications, 2012, 6(10): 1544–1551. |
| [14] | Zhang Q. Adaptive Kalman filter for actuator fault diagnosis[J]. Automatica, 2018, 93(1): 333–342. |
| [15] |
赵黎丽, 李平, 李修亮.
带遗忘因子的线性系统自适应观测器设计[J]. 浙江大学学报(工学版), 2011, 45(10): 1704–1709.
Zhao L L, Li P, Li X L. Design of adaptive observer with forgetting factor for linear system[J]. Journal of Zhejiang University (Engineering Science), 2011, 45(10): 1704–1709. DOI:10.3785/j.issn.1008-973X.2011.10.002 |
| [16] | Gao Z, Ding S X. Sensor fault reconstruction and sensor compensation for a class of nonlinear state-space systems via a descriptor system approach[J]. Iet Control Theory&Applications, 2007, 1(3): 578–585. |
| [17] | Kalman R E. A new approach to linear filtering and prediction problems[J]. Journal of basic Engineering, 1960, 82(1): 35–45. DOI:10.1115/1.3662552 |
| [18] | Zhang K, Jiang B, Shi P. Distributed fault estimation observer design with adjustable parameters for a class of nonlinear interconnected systems[J]. IEEE Transactions on Cybernetics, 2018: 1–10. |
| [19] |
张柯, 姜斌.
基于故障诊断观测器的输出反馈容错控制设计[J]. 自动化学报, 2010, 36(2): 274–281.
Zhang K, Jiang B. Fault diagnosis observer-based output feedback fault tolerant control design[J]. Acta Automatica sinica, 2010, 36(2): 274–281. |
| [20] | Zhang K, Staroswiecki M, Jiang B. Static output feedback based fault accommodation design for continuous-time dynamic systems[J]. International Journal of Control, 2011, 84(2): 412–423. DOI:10.1080/00207179.2011.557396 |
| [21] | Lan J, Patton R J. A new strategy for integration of fault estimation within fault-tolerant control[J]. Automatica, 2016, 69: 48–59. DOI:10.1016/j.automatica.2016.02.014 |