



0 引言
空间互联系统由许多结构相似的子系统或单元在空间上相互作用、彼此耦合构成,每个子系统可能是易处理的简单模型,但整个系统却表现出不同于单个子系统更为复杂的行为特性.根据子系统的耦合方式,空间互联系统可以分为周期性互联和无限互联两种类型.实际工程中的循环互联动态网络[1]、电力系统[2]和多智能体机器人编队控制[3]等具有明显的周期性互联系统特征;而多区晶体生长炉[4]、微悬臂阵列[5]、驱动梁的振动控制系统[6]和车辆排[7]等则属于无限互联系统,有时周期性互联也可以视作是一种特殊的无限互联形式.
目前,空间互联系统的控制方法主要有反馈控制、最优控制、自适应控制、滑模控制和模型参考跟踪控制等方法.文[8]针对弹簧—质量系统这类空间互联系统设计了分布式输出反馈控制器.文[9]研究了空间互联系统的最优控制问题,基于直接分解协调算法设计了分布式最优控制器.文[10]讨论了一类具有摄动环节的空间互联系统的自适应滑模控制跟踪问题,给出了分布式自适应滑模控制方案.文[11]以刚性污染流的偏微分方程模型为例对具有互联链的离散空间互联系统进行了模型参考跟踪控制研究.然而,上述方法面临的实际问题是,在工程上对于像机器人循环编队这类具有重复运行特性的空间互联系统,不仅要求其完成精确跟踪参考轨迹和规避障碍物的任务,而且要求该项任务能够在有限时间内完成.
迭代学习控制只需较少的先验知识和系统输入输出信息,通过不断迭代更新当前的控制输入,使得被控系统的实际输出轨迹在有限时间区间上就能够实现期望轨迹的跟踪.因此迭代学习控制方法必然是解决重复运行周期性空间互联系统跟踪控制问题的可行方法之一.文[12]将开环D型迭代学习控制算法应用于周期性空间互联系统的轨迹跟踪,未考虑系统的频率特性且误差收敛速度较慢.文[13]针对任意互联的异构系统,同时利用状态和输出误差信息设计迭代学习控制算法,实现了状态可测系统输出的准确跟踪,但对于状态不可测的系统明显具有工程应用的局限性.文[14]针对一类梯形电路空间互联系统,基于状态和输出信息,在有限频域范围内设计了迭代学习控制器以满足跟踪误差在迭代过程中的单调收敛特性,然而该系统模型仅是空间互联系统的一个特例,并不具有一般性.
因此,本文针对一类更具有一般性的离散型空间互联系统模型,仅需利用可测的输出信息,无需状态变量,设计了有限频域范围内的迭代学习算法.该算法在物理上易于实现,更符合工程实际;同时降低了全频域设计方法的保守性,充分利用实际系统的有限频域特性求取特定的控制器参数以获得更好的控制性能.最后,有源梯形电路的仿真结果验证了本文所提方法的有效性及可行性.
在本文中,标记X>0表示矩阵X是正定的,sym(X)代表着X+XT,X⊥是矩阵X的正交补. ρ(·)表示矩阵的谱半径,*表征矩阵的复共轭转置,(*)表示对称矩阵中对称位置的元素转置,⊗记作kronecker积.
引理1[15] 给定对称矩阵Γ∈Rp×p,矩阵Λ,Σ列的维度为p,则存在矩阵E使得不等式

|
(1) |
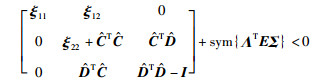
成立的充要条件是以下两个投射不等式

|
(2) |
成立,其中,Λ⊥和Σ⊥矩阵的列向量构成了零空间Λ和Σ的基.
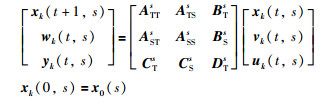
1 系统模型考虑一类具有重复运行特性的周期性空间互联系统,它由许多结构相同的单元周期性耦合构成,如图 1所示的每个子系统表示为如下状态空间模型:
|
(3) |

|
| 图 1 一维空间子系统模型 Fig.1 One-dimensional spatial subsystem model |
其中,

|
(4) |
并且k表示当前批次,t∈[0,T0]表示系统运行的工作周期,s是空间变量,表示子系统在空间的位置信息;xk(t, s)∈Rl,uk(t, s)∈Rm,yk(t, s)∈Rq,分别表示第k批次第S个子系统的状态、输入和输出;vk(t, s)和wk(t, s)表征子系统间的空间互联作用;一般来说,大多数物理上可实现的互联系统都与状态耦合,每个子系统的输出由其状态决定.在此情况下,通常可假定BSs,CSs,DTs均为零矩阵[13].
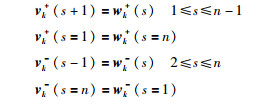
设wk+(t, s)和vk+(t, s)维数相同为m+,wk-(t, s)和vk-(t, s)维数相同为m-.如图 2所示子系统的数目为n(1≤s≤n),则周期性互联特征定义为[16]
|
(5) |

|
| 图 2 周期性互联 Fig.2 Periodic interconnection |
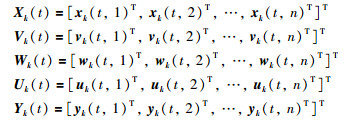
由于互联系统(3)同时包含了时间和空间变量,不便于直接进行系统综合分析,故需对系统模型进行重构.考虑利用提升技术对模型进行简化,定义如下提升向量:
|
(6) |
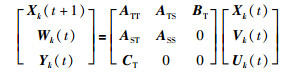
则整个周期性空间互联系统模型可等价描述为如下状态空间模型形式:
|
(7) |
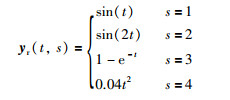
其中,
|
在模型(7)中不再包含空间变量s,但互联变量仍然存在.因此,须用消元法消除互联变量,利用式(5)的连接特征可以得到互联变量间的关系为

|
(8) |
其中,H是与时间t无关的置换矩阵.
将式(8)代入模型(7),可进一步得到一般形式的状态空间模型:
|
(9) |
其中,
|
为使系统(9)在多批次和有限批次时间条件下完成跟踪任务,定义期望输出轨迹Yr(t),引入状态误差向量和跟踪误差向量:

|
(10) |

|
(11) |
设计基于输出信息的迭代学习控制律为

|
(12) |
当前控制作用Uk(t)等于前一批次的控制作用Uk-1(t)加上修正项,该修正项仅由输出信息构成.其中,δk(t+1)=Yk(t)-Yk-1(t),K1和K2是待定的增益矩阵.
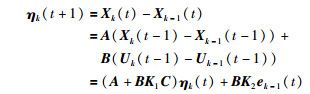
利用式(10)~式(12),可将模型(9)进一步变换为
|
(13) |
|
(14) |
从而得到离散重复过程模型:
|
(15) |
其中,

|
因此,接下来的系统稳定性分析和控制器增益求解将基于离散重复过程模型(15)展开.
3 稳定性分析引理2[17]假定

ⅰ) 
ⅱ) 
ⅲ)传递函数矩阵

引理3[18] 给定任意矩阵



|
(16) |
ⅱ)存在正定矩阵Q>0和对称矩阵P使得
|
(17) |
其中,
定理1 离散重复过程(15)在全频域范围内沿迭代轴渐近收敛的充分条件是存在对称正定矩阵W>0,使得下列矩阵不等式成立

|
(18) |
证明:式(18)成立的隐含条件为

|
(19) |

|
(20) |
成立.由于





此外,令W=-P,则式(18)可以表示成式(17)的形式,此时Π=diag{I,-I},由引理3可知(18)等价于

|
可直接得到
综上,证明完毕.
需指出的是,定理1的不等式中包含控制器增益矩阵相乘的耦合项以及未知矩阵W和控制器增益矩阵的乘积项,无法直接应用LMI工具箱求解,需通过变换将其转化为线性矩阵不等式.
定理2 离散重复过程(15)在整个频域范围内沿迭代轴渐近收敛的充分条件是存在对称正定矩阵L>0,矩阵F,X1和X2使得:

|
(21) |
|
(22) |
成立,则基于输出信息的迭代控制律(12)中的增益矩阵为K1=X1M-1,K2=X2.
证明:由Schur补引理将式(18)重构为
|
对上式分别左乘和右乘diag{I,I,W-1,Ι},并作变量代换,令F=W-1,可得
|
(23) |
在式(23)中,
需注意的是,定理1和定理2是在整个频率范围内分析系统的稳定性,保守性较强.在实际应用中,系统往往只需工作在特定的频率范围.因此,接下来将给出系统在有限频域范围沿批次渐近收敛的充分条件.
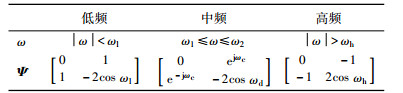
定理3 若整个频率范围被划分为有限个频率间隔,则离散重复过程(15)在各个频率范围内沿迭代轴渐近收敛的充分条件是存在正定矩阵S>0,Q>0,对称矩阵P和矩阵E使得下列矩阵不等式组成立
|
(24) |
|
(25) |
证明:假设式(24)成立,其可以重新表示为

|
根据引理1,选择
|
(26) |
进而由离散系统的稳定判据可知,
同理,假设式(25)成立,由Schur补引理将式(25)改写为
|
其中,
|
(27) |
|
(28) |
通过矩阵分解,将式(27)表示成式(17)的形式,此时Π=diag{I,-I},由引理3可知式(27)等价于式(16),因此可得到G(ejω)G(ejω) < I,故而ρ(G(ejω)) < 1,引理2的条件ⅲ)成立.
同时观察到式(28)的成立隐含条件

综上,证明完毕.
需指出的是,定理3中的不等式组引入了辅助矩阵变量E,虽增加了额外的自由度,但不等式组仍旧是非线性的.由于矩阵变量E和控制器增益矩阵K1、K2的乘积项存在,因此需将其进一步转换为线性矩阵不等式组,以便于利用LMI工具进行求解.
定理4 离散重复过程(15)在各个频率区间内沿迭代轴渐近收敛的充分条件是存在正定矩阵

|
(29) |
|
(30) |
|
(31) |
成立.其中

证明:对式(24)分别左乘和右乘diag{FT,FT}及其转置矩阵可以得到
|
注意到,在上述不等式中,BK1CF是非线性项,故需进一步转换成线性矩阵不等式形式.利用等式条件(29),得到BK1CF=BK1MC,令K1M=X1,即可证得式(30)的线性形式.同理,对式(25)分别左乘和右乘diag{FT,FT,I,I}及其转置矩阵,即可证得式(31)形式,证明完毕.
需注意的是,定理2和定理4中的等式(21)和(29)成立要求矩阵C是行满秩的,并且这些等式一般无法由LMI工具箱直接求解.因此,在实际应用中常常采用近似的办法,类似于文[19]的处理,将其转化为如下不等式条件

|
(32) |
其中ε是一个充分小的正数.当ε足够小时,条件(21)和(29)近似满足.通过Schur补公式,式(32)等价于
|
(33) |
这样近似处理的办法放宽了对定理的使用局限,但也仅限于在实际工程中作为一种常用的处理手段,在定理的推导过程中依然要满足等式条件.
4 仿真实例为验证本文所提方法的有效性,以有源空间梯形电路为研究对象,4个电路的互联结构如图 2所述,其中每个电路单元如图 3所示[20].

|
| 图 3 空间梯形电路的子单元 Fig.3 Subunit of spatial ladder circuit |
根据基尔霍夫定律,第s(s=1~4)个电路单元的连续模型为
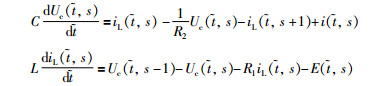
|
(34) |
其中,


|
(35) |
参数λ=0.1,电容C=0.05 F,电感L=0.05 H,电阻R1=10 Ω,R2=1.6 Ω.
通过前向差分法,以T=0.01 s为采样周期对子系统(34)进行离散化,t为离散采样点.设各电路单元交互的信息为各自的电感电流和电容电压,即

|
则模型(34)离散化后可表示为式(3)形式的互联子系统模型.
状态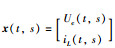
|
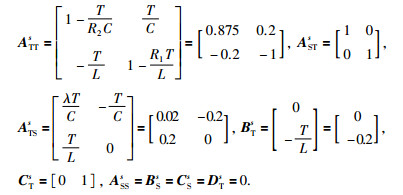
设每个批次的有限工作周期为6 s,系统初始条件x0(0,s)=0,子系统的期望输出轨迹为
|
(36) |
绘制该期望轨迹的频谱如图 4所示,在0~5 Hz频率范围内期望信号的幅值显著衰减,可直接选取该频段作为系统运行的低频区,故低频区的截止角频率为ωl=0.314(rad/s).

|
| 图 4 期望轨迹的频谱 Fig.4 Spectrum of the desired trajectories |
取ε=0.000 1,根据定理4求得有限频域控制器增益矩阵为
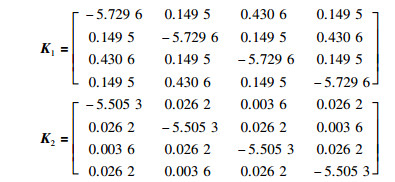
|
设迭代批次为20,采样点为600,每一批次系统循环采样600个点,在根据定理4求出迭代学习控制器增益矩阵之后,由式(12)可知本文算法每个批次仅需再进行各2次提升向量的乘和加运算,算法并不复杂.本次实验仿真实验设备使用主频为3.2 GHz,处理器为Inter Core i5-6500的计算机,完成整个仿真过程仅需消耗0.186 s,算法实时性较好.
同时为进一步评价系统整体的跟踪控制性能,引入跟踪误差的均方根(root mean square)作为性能指标[21]
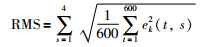
|
(37) |
具体仿真结果如图 5~9所示.随着迭代批次的增加,各个子系统的输出轨迹都在有限工作时间内完全跟踪至期望的参考轨迹,跟踪误差沿批次轴单调渐近收敛于零.

|
| 图 5 子系统1的轨迹曲线 Fig.5 Trajectory curve of subsystem 1 |

|
| 图 6 子系统2的轨迹曲线 Fig.6 Trajectory curve of subsystem 2 |

|
| 图 7 子系统3的轨迹曲线 Fig.7 Trajectory curve of subsystem 3 |

|
| 图 8 子系统4的轨迹曲线 Fig.8 Trajectory curve of subsystem 4 |

|
| 图 9 均方根误差曲线 Fig.9 Root mean square error curve |
同样根据定理2求得全频域控制器增益矩阵为
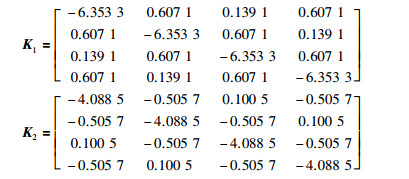
|
其跟踪控制误差性能曲线如图 9所示,有限频域迭代学习控制作用下的系统输出跟踪误差收敛速度更快,跟踪效果更好,从而验证了周期性空间互联系统迭代学习控制器在有限频域范围内设计的可行性和有效性.
5 结论本文针对一类周期性互联的离散空间互联系统,基于其二维状态空间模型,通过提升技术和消去互联变量得到一维等价模型形式.然后基于重复过程理论,设计迭代学习控制算法将被控系统模型转化为重复过程模型,并结合广义KYP引理给出了系统在不同频率范围内稳定和跟踪误差渐近收敛的充分条件.最后通过有源梯形电路的仿真验证了算法可行性.本文的后续研究将包括空间互联系统在扰动和不确定性存在情形下的鲁棒迭代学习控制方法研究以及在实物装置上的实验验证等工作.
| [1] | Siami M, Motee N. Robustness and performance analysis of cyclic interconnected dynamical networks[C]//Proceedings of the Conference on Control and its Applications. USA: SIAM, 2013: 137-143. |
| [2] | Schuler S, Münz U, Allgöwer F. Decentralized state feedback control for interconnected systems with application to power systems[J]. Journal of Process Control, 2014, 24(2): 379–388. |
| [3] | Goodwine B, Antsaklis P. Fault-tolerant multiagent robotic formation control exploiting system symmetries[C]//IEEE International Conference on Robotics and Automation. Piscataway, NJ, USA: IEEE, 2011: 2872-2877. |
| [4] | Demir O, Lunze J. A decomposition approach to decentralized and distributed control of spatially interconnected systems[C]//18th IFAC World Congress. Amsterdam, Netherlands: ELSEVIER, 2011: 9109-9114. |
| [5] | Sarwar A, Voulgaris P G, Salapaka S M. Modeling and distributed control of an electrostatically actuated microcantilever array[C]//American Control Conference. Piscataway, NJ, USA: IEEE, 2007: 4240-4245. |
| [6] | Al-Taie F, Werner H. Structure-preserving model reduction for spatially interconnected systems with experimental validation on an actuated beam[J]. International Journal of Control, 2016, 89(6): 1248–1268. |
| [7] | Wang G P, Xu H L, Zhai X K, et al. N-D representation and generalised Kalman-Yakubivich-Popov lemma of spatially interconnected systems with interconnected chains[J]. International Journal of Systems Science, 2017, 48(15): 3160–3171. |
| [8] | Huang H, Wu Q H, Li H. Synthesis for Spatially Interconnected Systems with Distributed Output Feedback Controllers[J]. Acta Automatica Sinica, 2009, 35(8): 1128–1135. |
| [9] |
李晖, 伍清河.
空间互联系统的最优控制[J]. 兵工学报, 2010, 31(6): 685–691.
Li H, Wu Q H. Optimal control of spatially interconnected systems[J]. Acta Armamentarii, 2010, 31(6): 685–691. |
| [10] | Yu D. Distributed model reference adaptive sliding mode control for spatially interconnected systems with perturbed links[C]//IEEE International Conference on Automation and Logistics. Piscataway, NJ, USA: IEEE, 2010: 648-653. |
| [11] | Feng H Y, Xu H L, Xu S Y, et al. Model reference tracking control for spatially interconnected discrete-time systems with interconnected chains[J]. Applied Mathematics and Computation, 2019, 340: 50–62. |
| [12] | Kim B Y, Lee T, Kim Y S, et al. Iterative learning control for spatially interconnected systems[J]. Applied Mathematics and Computation, 2014, 237: 438–445. |
| [13] | Jeong J Y, Kim Y S, Ahn H S. Discrete-time repetitive process-based iterative learning control for heterogeneous systems with arbitrary interconnections[C]//11th IEEE International Conference on Control & Automation. Piscataway, NJ, USA: IEEE, 2014: 1139-1144. |
| [14] |
陶洪峰, 魏强, 杨慧中.空间互联系统的有限频率范围迭代学习控制[J/OL]. (2019-03-07)[2019-08-26]. https://doi.org/10.13195/j.kzyjc.2018.1313. Tao H F, Wei Q, Yang H Z. Iterative learning control in finite frequence range for spatially interconnected systems[J/OL]. (2019-03-07)[2019-08-26]. https://doi.org/10.13195/j.kzyjc.2018.1313. |
| [15] | Gahinet P, Apkarian P. A linear matrix inequality approach to H∞ control[J]. International Journal of Robust and Nonlinear Control, 1994, 4(4): 421–448. |
| [16] | D'Andrea R, Dullerud G E. Distributed control design for spatially interconnected systems[J]. IEEE Transactions on Automatic Control, 2003, 48(9): 1478–1495. |
| [17] | Rogers E, Galkowski K, Owens D H. Control systems theory and applications for linear repetitive processes[M]. Berlin, Germany: Springer-Verlag, 2007. |
| [18] | Iwasaki T, Hara S. Generalized KYP lemma:Unified frequency domain inequalities with design applications[J]. IEEE Transactions on Automatic Control, 2005, 50(1): 41–59. |
| [19] | Tao H F, Liu Y, Yang H Z. Output information based fault-tolerant iterative learning control for dual-rate sampling process with disturbances and output delay[J]. Mathematical Problems in Engineering, 2018, 2018: 1–15. |
| [20] | Paszke W, Gałkowski K. Design of iterative learning control schemes for a class of spatially interconnected systems[C]//36th Chinese Control Conference. Piscataway, NJ, USA: IEEE, 2017: 3527-3532. |
| [21] |
陶洪峰, 沈建强, 杨慧中.
一类不确定性离散非线性重复过程的迭代学习容错控制[J]. 信息与控制, 2019, 48(6): 88–96.
Tao H F, Shen J Q, Yang H Z. Iterative learning fault-tolerant control for a class of uncertain nonlinear discrete repetitive processes[J]. Information and Control, 2019, 48(6): 88–96. |