



0 引言
工业过程控制中的被控对象的内部结构是未知的,所以采用一定的方法得到被控对象的精确等价模型尤为重要.要想实现对被控对象的良好控制效果,首先要确定被控对象的模型,而获得被控对象模型的有效措施是系统辨识[1].工业过程被控对象往往是非线性的、复杂的、高阶的[2-4],我们是无法知道其内部结构的,其相当于一个黑匣子,只能通过给定输入信号进而得到输出信号,采取合适的辨识方法获取对象的等价模型[5-6].当前已存在的参数辨识方法主要使用FOPDT和SOPDT模型去辨识被控对象[7-9],但是考虑到有些被控对象的辨识采用重极点模型可以取得更好的辨识效果,所以本文分别用重极点加滞后模型和非重极点加滞后模型中二阶加滞后模型进行模型辨识.在确定模型结构的情况下,重极点模型可以直接通过传递函数的微积分处理求取参数,非重极点模型需要结合极小化误差准则才能求解参数.模型辨识的方法又由信号的时间域和频率域可以分为时域分析法和频域分析法,本文是通过传递函数的拉普拉斯变换进行辨识的,也属于频域分析法.在模型参数的求解上,当未知参数较多时,需要采用采用极小化误差准则中的一些方法进行求解,其中最小二乘法便是使用的最多的模型参数求解方法[10-12].在模型参数求解上,除了最小二乘法,还有辅助变量法、牛顿迭代法、积分方程法,粒子群法等[13-16],但这些处理方法都更加复杂,计算量更大,不容易实现,尤其像牛顿迭代法和粒子群法都需要大量的迭代才可能计算出结果,而积分方程法也需要多重积分才可能计算出结果,另外还有一些基于最小二乘法原理推导出来的方法,使用并不多[17-18],本文将采用最小二乘法来进行模型参数求解.
虽然一般系统辨识是针对闭环系统在开环情况下的辨识,但是有些情况下,闭环系统不允许反馈回路断开,所以辨识需要通过闭环系统的输入输出数据,因此,本文分别对开环和闭环两种情况进行辨识.选取不同类型的被控对象,进行阶跃响应仿真,根据输入输出信号的分析,对频域下的传递函数进行微分处理,对信号数据进行梯形积分处理,根据本文算法得到传递函数模型的相关参数.通过模型Nyquist图和输出误差值来判断辨识模型与原始模型的拟合程度.
1 输入输出信号分析在传递函数参数辨识的输入信号的选择上,采用的信号主要有阶跃信号、脉冲信号、矩形方波信号,但其中使用最多的还是阶跃信号.本文考虑的被控对象在不含积分环节的情况下,输入阶跃信号时,系统的输出会趋于一个新的稳定状态,这称为系统的自衡性.因此,当阶跃信号加入到一个含有滞后环节的被控对象的输入端时,在开环和闭环下被控对象的输出响应曲线一般如图 1所示,会趋于一个稳定值.

|
| 图 1 开环和闭环下模型的阶跃响应曲线 Fig.1 Step response curve of model under open loop and close loop |
对闭环系统中的被控对象进行辨识为闭环辨识,对开环系统中的被控对象进行辨识则为开环辨识.闭环系统就是根据被控对象输出反馈回输入端,对比实际输出值与输入值,一般会有个偏差,我们取输入量与输出量的误差值,作为控制器的输入,这种系统也成为负反馈控制系统.相反,不将输出值作为反馈回来影响系统的输入,这样的系统称这为开环系统.开环系统和闭环系统的结构示意图如图 2(a)、2(b)所示.

|
| 图 2 开环和闭环系统结构示意图 Fig.2 Structure diagram of open-loop and close-loop system |
用r(t)表示阶跃信号,y(t)表示阶跃响应输出信号,对应的拉普拉斯变换用R(s)和Y(s)表示.由r(t)是阶跃信号可得:
|
(1) |
其中,h表示阶跃信号的幅值.
当t>0时,可得:
|
(2) |
同理可得输出信号为
|
(3) |
为了确保R(s)和Y(s)存在,需要引入一个阻尼因子α,当s=α>0时,可知是衰减收敛的,当时间常数t大于某个时间点时有y(t)e-αt→0,即Y(s)是绝对可积的.将s=α代入式(2)、式(3)可得:
|
(4) |
|
(5) |
式(5)的计算采用梯形积分法,设t=T时,有y(T)·e-αT→0,则有
证明:本文中的阶跃响应输出为一个趋于恒定的值,也就是常数,即





将Y(α)中的积分域均分为N等分,则:
|
(6) |
当T/N取的足够小时,
本章节针对含重复极点加滞后模型和不含重复极点加滞后模型,给出了对应的辨识方法,并且在仿真实验中对多种类型的被控对象进行辨识,对于两种模型,分别给出了3个仿真对象进行验证,结果表明本文方法能够精确辨识工业中多种类型的被控对象.
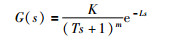
2.1 含有重极点加滞后模型的辨识含有重极点加滞后模型可以由式(7)表示:
|
(7) |
其中,K为静态增益,T为时间常数,m为重极点的个数和模型阶次,L为纯滞后系数.当系统为开环系统时,此时被控对象的输入输出就是系统的输入和输出,可得:

|
(8) |
式(7)两边对s求一阶导数和二阶导数可得:
|
(9) |
|
(10) |
将s=α带入式(8)可得:

|
(11) |
G(α),G′(α)和G″(α)可以由系统的阶跃响应数据通过梯形积分方法由式(3)、(9)、(10)、(11)计算出来.
对式(7)两边进行取对数处理,以减少计算量可得:

|
(12) |
式(12)两边对进行求导,并将一次求导和二次求导结果分别记作Q1(s)和Q2(s),可得:

|
(13) |

|
(14) |
选择合适的α,经过大量仿真实验发现,α一般取0.01~0.5,需要满足条件Q2(s),将s=α代入式(13)和式(14)结合已计算出的G(α),G′(α)和G″(α)可得:
|
(15) |

|
(16) |
根据式(15)、式(16)求出的T和L以及G(α)可以由下式计算出K:

|
(17) |
通过式(15)~式(17)可以将开环情况下的重极点加滞后模型的参数计算出来.
当系统为闭环系统时,系统的输出仍为被控对象的输出,但被控对象的输入此时将变为控制器的输出u(t),其拉普拉斯变换为
|
(18) |
Y(s)不变由式(3)可知.
Y(s)和U(s)下式关系:

|
(19) |
式(18)和式(3)两边对s求n阶导数可得:
|
(20) |
式(19)两边对s求一阶导数和二阶导数,则有:

|
(21) |
由式(21)可得:

|
(22) |

|
(23) |
同样,选取合适的α,将s=α代入式(19)、式(22)和式(23)可得G(α),G′(α)和G″(α),然后由式(13)、式(14)计算出Q1(α)和Q2(α),再由式(14)~(16)计算出对应的模型参数T,L和K.
2.2 不含有重极点加滞后模型的辨识方法通常情况下,含有两个不同极点加滞后模型即二阶加滞后模型(SOPDT)就可以很好地拟合被控对象,所以不含重极点二阶加滞后模型采用SOPDT模型,可以由式(24)表示:
|
(24) |
由式(13)、式(14)同理,可得:
|
(25) |

|
(26) |
将式(25)和式(26)分别记为P1(s)和P2(s).
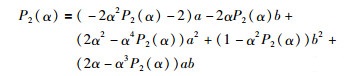
将s=α代入P2(s),经过变形则有:
|
(27) |
为了求解a,b的值,本文采用最小二乘法,将上式写成最小二乘形式为

|
(28) |
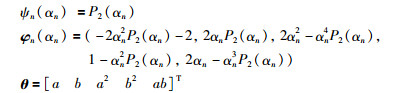
其中:
|
通过取不同的α值,可以得到一系列的ψn(αn)和φn(αn),则有:

|
(29) |
则最小二乘方程为
|
(30) |
根据最小二乘法求解可得:

|
(31) |
由上式可得模型参数:

|
(32) |
将式(32)中a,b的值代入到式(24)、式(25)中可得:

|
(33) |

|
(34) |
另外,G(α),G′(α)和G″(α)在开环和闭环条件下的值可同样由第2小节中的方法得到,经大量仿真发现,对于α的取值,可以取α=0.1+0.01n,n取5到10之间,同时保证a,b为正解,可以取得较好辨识效果,然后根据式(32)~式(34)可以将SOPDT模型的参数计算出来.
3 仿真实验为了检验辨识方法的精度和鲁棒性,通过观察给定模型和辨识出的模型的Nyquist图和阶跃响应曲线,并在仿真实验中加入噪声来检验其抗干扰能力和鲁棒性,因此引入信噪比(SNR)的概念[19],通常噪声强度是用式(35)来表示:
|
(35) |
NSR为噪声信号绝对值的均值与输出信号绝对值均值的比值,SNR=20ln(1/NSR)(dB).
同时,为了更加直观地表示辨识模型的精确度,引入一个误差值ε作为评价标准,ε的计算方式如式(36)所示:
|
(36) |
其中,N表示阶跃响应输出数据的采样时刻;T表示采样时间;
例1、例2、例3采用2.1小节的中的方法,利用含重极点加滞后模型对被控对象进行辨识,该方法在参数求解上不需要结合复杂算法,直接通过输入输出数据得到相应的公式值接可以得到,下面分别给出了开环和闭环的辨识结果.
例1 考虑仿真模型FOPDT的传递函数为
|
在不考虑信噪比的情况下,用2.1小节中提出的辨识方法辨识出的模型参数和原始模型辨参数完全一致.在开环情况下,当NSR=10%时,取α=0.1,用2.1中的辨识方法辨识出的模型为

|
在闭环情况下,当NSR=10%时,取α=0.1,用2.2小节中的辨识方法辨识出的模型为
|
开环和闭环条件下辨识出的模型和原始模型的Nyquist图如图 3所示.

|
| 图 3 开环和闭环辨识出的FOPDT模型的Nyquist图 Fig.3 The Nyquist plot of FOPDT model under open and close loop |
由于FOPDT模型较为简单,本文方法和传统方法普遍辨识出的精度都较高,相比之下差距不大,此处不再选取其他方法得到的模型进行对比.
例2 考虑一个高阶对象传递函数为
|
采用文[6]中辨识的模型作为对比对象,对比模型为

|
当系统为开环且NSR=20%时,取α=0.05,用2.1小节中的辨识方法辨识出的被控对象模型为
|
当系统为闭环且NSR=20%时,取α=0.02,用2.2小节中的辨识方法辨识出的被控对象模型为

|
开环和闭环条件下辨识出的高阶对象模型和原始模型以及对比模型的Nyquist图如图 4和图 5所示.由图可以看出,无论是在开环还是在闭环条件下,本文方法都可以对给出的高阶对象进行高精度的辨识,且辨识效果比文[6]中的方法拟合度更好.

|
| 图 4 开环辨识出高阶对象的Nyquist对比图 Fig.4 The contrast Nyquist plot of high order process identified under open loop |

|
| 图 5 闭环辨识出高阶对象的Nyquist对比图 Fig.5 The contrast Nyquist plot of high order process identified under close loop |
例3 考虑一个大滞后对象传递函数为

|
文[20]给出的大滞后模型,利用其方法辨识出的被控对象模型为
|
且该方法没有考虑噪声干扰的情况,本文方法均考虑有噪声干扰的情况.当系统为开环且NSR=20%时,取α=0.1,用2.1小节中的辨识方法辨识出的被控对象模型为
|
当系统为闭环且NSR=20%时,取α=0.05,用2.1小节中的辨识方法辨识出的被控对象模型为

|
开环和闭环条件下辨识出的大滞后对象模型和原始模型以及对比模型的Nyquist图如图 6和图 7所示.

|
| 图 6 开环辨识出的含有大滞后对象的Nyquist对比图 Fig.6 The contrast Nyquist plot of process with long dead time identified under open loop |

|
| 图 7 闭环辨识出的含有大滞后对象的Nyquist对比图 Fig.7 The contrast Nyquist plot of process with long dead time identified under close loop |
从图中可以看出,本文方法即使在噪声干扰下辨识出的模型仍有很高的辨识精度与文[20]所给方法在无噪声干扰下辨识出的模型差异不大,说明本文方法对于大滞后对象的辨识也有很高的辨识精度以及抗噪声干扰能力.
例4、例5、例6采用2.2小节的中的方法,利用SOPDT模型对被控对象进行辨识,一般情况下,开环辨识出的结果在有噪声干扰的情况下更精确,所以下面直接考虑闭环条件下的辨识结果,且信噪比均为NSR=20%.
例4 考虑一个二阶不含滞后对象[14]的传递函数为

|
文[14]采用的是一种新的牛顿迭代法求解的模型参数,该方法需要进行大量的迭代计算才有可能计算出模型参数,辨识出的模型为

|
取α=0.1+0.01n(n=1,2,…,5),采用本文方法在闭环条件下辨识出的SOPDT模型为

|
辨识出的对象模型和原始模型以及对比模型的Nyquist图如图 8所示,可以看出本文方法辨识出的模型与原始模型拟合度更高.

|
| 图 8 闭环辨识出的二阶不含滞后对象的Nyquist对比图 Fig.8 The contrast Nyquist plot of second order process without dead time identified under close loop |
例5 考虑含有4个不同极点对象[16]的传递函数为

|
文[16]中在参数求解上采用了粒子群算法,且文中也和最小二乘法对比,差距不大,但算法上实现要更复杂,同样需要进行多次迭代才有可能计算出模型参数,辨识出的SOPDT模型为

|
取α=0.1+0.01n(n=1,2,…,5),利用本文方法辨识出的被控对象模型为

|
所给被控对象的传递函数与本文辨识出的模型以及对比方法辨识出的模型如图 9所示.

|
| 图 9 闭环辨识出含有4个不同极点对象的Nyquist对比图 Fig.9 The contrast Nyquist plot of process with 4 different poles identified under close loop |
例6 考虑二阶含大滞后对象[15]的传递函数为
|
文[15]采用的是积分方程法求解的模型参数,该方法通过时域分析法,需要进行多次重积分才能求解,辨识出的模型为

|
取α=0.1+0.01n(n=1,2,…,5),采用本文方法在闭环条件下辨识出的SOPDT模型为

|
辨识出的对象模型和原始模型以及对比模型的Nyquist图如图 10所示,可以看出本文方法辨识出的模型与原始模型拟合度更高.

|
| 图 10 闭环辨识出的二阶含大滞后对象的Nyquist对比图 Fig.10 The contrast Nyquist plot of second order process with long dead time identified under close loop |
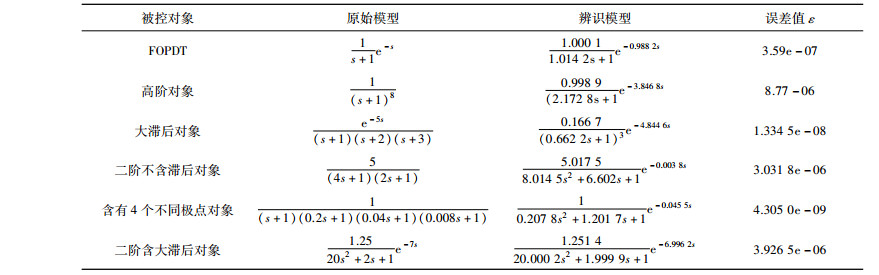
上文6个仿真对象除了给出每个被控对象与辨识模型的Nyquist对比图来观察辨识的精确度,还通过辨识模型与被控对象的阶跃输出误差值来更加直观的评判,6个辨识对象的误差值如表 1所示,可以看出,辨识出的模型与实际模型阶跃响应输出误差值普遍小于10e-6级,说明辨识出的模型精确度很高.
为本文提出了一种可以针对多种类型被控对象的模型参数辨识方法,并用比较有代表性的几种被控对象进行仿真,该方法不需要任何先验条件,只需要得到被控对象在阶跃响应下的输入输出数据,无需复杂的算法处理和大量的计算就可以辨识出被控对象在开环和闭环条件下的重极点加纯滞后模型和以SOPDT模型为代表的不含重复极点加滞后模型,仿真结果表明,该方法辨识出的模型精度高,且抗干扰能力强,即使在噪信比为20%时仍能很好的完成辨识,辨识精度很高,优于一些传统的和新颖的辨识方法.辨识出的被控对象模型精确度越高,越有利于对被控系统的分析以及控制器的参数整定,便于整体控制系统实现良好的控制效果,可用于实际工业过程对象的辨识.
| [1] |
李少远, 蔡文剑.
工业过程辨识与控制[M]. 北京: 化学工业出版社, 2005: 108-124.
Li S Y, Cai W J. Industry process identification and control[M]. Beijing: Chemical Industry Press, 2005: 108-124. |
| [2] |
王维贺, 王平.
二阶加纯滞后对象模型辨识方法及其应用[J]. 化工自动化及仪表, 2010, 37(9): 21–24.
Wang W H, Wang P. Identification method and application of second-order plus time delay model[J]. Control and Instruments in Chemical Industry, 2010, 37(9): 21–24. DOI:10.3969/j.issn.1000-3932.2010.09.006 |
| [3] |
林巍, 王亚刚.
串级控制系统闭环辨识及PID参数整定[J]. 控制工程, 2018, 25(1): 11–18.
Lin W, Wang Y G. Modeling for cascade control system based on frequency domain and pid parameter tuning[J]. Control Engineering of China, 2018, 25(1): 11–18. |
| [4] | Xu X, Wang F. A modeling method for complex system using hybrid method[J]. Journal of Discrete Mathematical Sciences and Cryptography, 2017, 20(1): 239–254. DOI:10.1080/09720529.2016.1178927 |
| [5] |
胡钢墩, 李发泽.
惯性系统的时域在线辨识[J]. 控制与决策, 2010, 25(1): 133–136.
Hu G D, Li F Z. On-line identification of inertia system in time domain[J]. Control and Decision, 2010, 25(1): 133–136. |
| [6] | Wang Y G, Xu X M, et al. Online identification of process systems in the frequency domain[J]. Inderscience Publishers, 2011, 41(1/2): 11–16. |
| [7] | Wang Q G, Guo X, Zhang Y. Direct identification of continuous time delay systems from step responses[J]. Journal of Process Control, 2001, 11(5): 531–542. DOI:10.1016/S0959-1524(00)00031-7 |
| [8] |
樊厉, 林红权, 高东杰.
过程控制常用连续模型的直接辨识法及应用[J]. 控制工程, 2006(04): 310–313, 323.
Fan L, Lin H Q, Gao D J. Direct identification algorithm of continuous models and its application to process control[J]. Control Engineering of China, 2006(04): 310–313, 323. DOI:10.3969/j.issn.1671-7848.2006.04.007 |
| [9] | Chen L, Li J, Ding R. Identification for the second-order systems based on the step response[J]. Mathematical & Computer Modelling, 2011, 53(5/6): 1074–1083. |
| [10] |
丁东杰, 王亚刚.
工业过程频域建模及控制器参数整定[J]. 控制工程, 2016, 23(11): 1714–1718.
Ding D J, Wang Y G. Modeling in frequency domain and controller parameter tuning for industrial processes[J]. Control Engineering of China, 2016, 23(11): 1714–1718. |
| [11] |
王修中, 岳红, 高东杰.
二阶加滞后连续模型的直接辨识[J]. 自动化学报, 2001, 37(5): 728–731.
Wang X Z, Yue H, Gao D J. Direct Identification of Continuous Second-order plus Dead-time Model[J]. Acta Automatica Sinica, 2001, 37(5): 728–731. |
| [12] |
严晓久, 周爱国, 林建平, 等.
基于辅助变量法的系统参数辨识[J]. 机床与液压, 2006(12): 180–181, 184.
Yan X J, Zhou A G, Lin J P, et al. Parametric system identification based on instrumental variable method[J]. Machine Tool & Hydraulics, 2006(12): 180–181, 184. DOI:10.3969/j.issn.1001-3881.2006.12.063 |
| [13] | Ling X, Lei C, Xiong W. Parameter estimation and controller design for dynamic systems from the step responses based on the Newton iteration[J]. Nonlinear Dynamics, 2015, 79(3): 2155–2163. |
| [14] | Salim A. Identification from step response-the integral equation approach[J]. The Canadian Journal of Chemical Engineering, 2016(94): 2243–2256. |
| [15] | Chris C, Tindle J, Burn K. A comparison of software-based approaches to identifying FOPDT and SOPDT model parameters from process step response data[J]. Applied Mathematical Modelling, 2016(40): 100–114. |
| [16] |
王浩宇, 张云生, 张果.
系统辨识及自适应控制系统算法仿真实现[J]. 控制工程, 2008(S2): 77–80.
Wang H Y, Zhang Y S, Zhang G. Implementation on system identification and adaptive control system simulation algorithm[J]. Control Engineering of China, 2008(S2): 77–80. |
| [17] |
靳其兵, 刘子宜.
基于阶跃响应的带纯滞后闭环辨识新方法[J]. 系统仿真学报, 2010, 22(9): 2168–2172.
Jin Q B, Liu Z Y. Novel identification method with time delay from step response[J]. Journal of System Simulation, 2010, 22(9): 2168–2172. |
| [18] | Fedele G. Frequency response estimation from impulse or step-like response by virtual experiments[J]. Asian Journal of Control, 2016, 18(4): 1289–1298. DOI:10.1002/asjc.1246 |
| [19] |
徐江华, 孙荣, 邵惠鹤.
大滞后过程的PI控制器整定[J]. 控制与决策, 2004, 19(1): 99–101.
Xu J H, Sun R, Shao H H. PI controller tuning for large dead-time processes[J]. Control and Decision, 2004, 19(1): 99–101. DOI:10.3321/j.issn:1001-0920.2004.01.024 |