



0 引言
多年以来,国内外专家学者从未停止对多智能体系统控制问题的研究[1-4].其中,一致性控制更是成为控制领域不可或缺且影响久远的课题[5-7].
随着智能科技的不断进步和传感器的更新换代,为每个智能体配备嵌入式微处理器来收集邻居节点的信息,可以实施根据设计好的一致性控制协议更新每个智能体的动作.但在实际应用中,一方面,单个智能体有限的处理、存储数据的能力和相对较少的存储空间造成数据在传输过程中的间断和缺失;另一方面,系统网络信道带宽的有限性使得网络资源也具有局限性.因此,如何设计合适的控制协议,在有限的网络资源下,实现相应的控制任务变得更具挑战性.针对上述问题,常用控制方法为时间触发控制[8-10],即事先给定一个固定的时间周期,智能体只需要按照给定的间隔触发控制器来相互传递状态值.这种方法较原始的连续触发方法相比,虽然减少了控制器触发的次数,但是固定的触发时间让一些不需要触发的智能体也跟着触发,因而在节约网络资源方面并没有太大改进,基于此,提出了事件触发控制策略[11-13],即智能体控制器的触发既不是连续的,也没用固定的时间周期,而是根据某个触发条件,只有当智能体达到这个触发条件时,才会执行控制器完成通讯.可以看出,采样次数可以通过设计控制策略来有效减少.参考事件触发控制机制,减少采样次数实际上节约了很大的能源.然而,事件触发机制需要装配大量的检测硬件,从而增加了硬件成本.而在自触发控制机制[14-19]中,控制器的下一个触发时间的计算只依赖于当前触发时间及当前的状态值误差,这不像事件触发那样需要连续地获取测量误差来检测触发条件.文[20-22]设计了两类自触发控制方案:一类基于状态反馈,另一类基于输出反馈.文[14]讨论了带有自触发控制器的多智能体系统,并对其平均一致问题进行了理论性地分析.与上述文献比较,本文的控制策略既考虑到了自触发机制,还探讨了触发条件的选择标准.这在以往的研究中是较为少见的.
本文的主要创新点:1)为智能体系统设计观测器,以此解决智能体状态完全量测的不可能性;2)给出了智能体任意两次触发时间之间满足的条件,理论上验证了触发条件的可实现性;3)与集中式策略比较,分布式策略不需要明确系统全局拓扑网络,而只需要利用对应智能体与其“邻居”的状态信息和连接关系即可实现系统一致性.
与已有的事件触发控制[23-25]相比,本文提出的自触发控制可以更进一步减少多智能体系统内信息的传递量,以采样误差为基础的控制协议减少了采样器因系统状态改变引起的控制器参数的频繁调整,进而减小其磨损.
1 预备知识和问题描述系统连通拓扑信息图可以用G=(V,ε,A)表示,其中V={1,2,…,N}是所有智能体节点的总集合;ε=V×V是所有相邻互相联系的智能体边的集合;A=(aij)∈RN×N表示系统智能体间信息交互后加权构成的矩阵,元素值非负;如果边(i,j)∈ε,那么i称为j的邻居;智能体的邻居集定义为Ni={j|(i,j)∈ε};令
多智能体系统中,N个跟随者的动态方程为

|
(1) |
其中,xi(t)∈Rn表示跟随者状态;ui(t)∈Rm为控制输入量;yi(t)∈Rl为测量输出量;A,B,C为常数矩阵,假设(A,B)可控,(A,C)可观测.
领导者的动态方程描述为
|
(2) |
其中,x0(t)∈Rn为领导者状态.
由于跟随者的状态不可测量,设计观测器:

|
(3) |
其中,
在状态测量过程中,观测器只需要跟踪测量对应智能体的状态变化,这大大减少了交互的信息量.
针对系统(1)和系统(2)构成的领导-跟随系统,结合(3)设计自触发控制策略:

|
(4) |
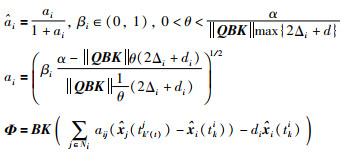
其中,K代表控制增益,其值需要在控制过程中确定,di为邻接矩阵中对应的元素,
任何的初始条件之下,一致性策略控制下,系统内跟随智能体的状态总是跟随着领导智能体,即:

|
如果定义D=diag(d1,d2,…,dN)为无向图之中领导智能体的系统邻接矩阵,那么与之对应的联合拓扑图为G=G∪{0}.定义H=L+D,有引理1成立.
引理1[16] 当且仅当联合图连通时,矩阵H有非零特征值λ1,λ2,…,λN,并且H是正定的.
2 主要结果定理1 针对系统(1)和系统(2)构成的领导—跟随系统,假设拓扑图G是连通的,选取矩阵G使得A+GC为赫尔维茨矩阵.给定一个正常数α,存在向量Q和对应的μ,可以满足式(5)的黎卡提不等式:

|
(5) |
则控制器增益矩阵K=BTQ,这时,在任意初始条件下,自触发控制协议(4)能够控制跟随智能体渐近地跟踪领导智能体的状态.
本文提出的自触发控制是将复杂的一致性控制目标分解为离散子目标,将每一个满足自触发条件的下一个触发时刻作为上一个子目标的完成时间.根据式(19),本文触发时刻的选择:

|
(6) |
其中,
|
证明 定义智能体i和领导者之间的跟踪误差、智能体i的观测误差分别为

|
(7) |
其中,εi(t)为引入误差变量.
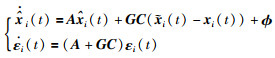
根据智能体动态方程(1)、状态观测器方程(3)及触发时刻(6),可得跟踪误差和观测误差的动态方程:
|
(8) |
其中,

|
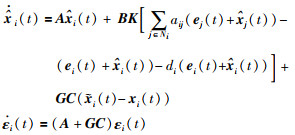
智能体i误差定义为

|
(9) |
于是,系统(8)可改写为
|
(10) |
如果A+GC为赫尔维茨矩阵,那么εi(t)是渐近收敛的,即:

|
(11) |
此时,系统(10)中跟踪误差系统的稳定性等价于系统(12)的稳定性:
|
(12) |
针对系统(12),选取李亚普诺夫函数:
|
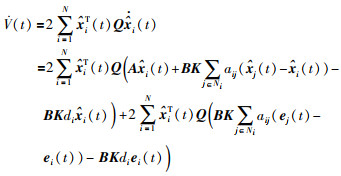
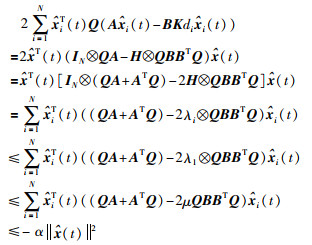
其中,Q>0.求导可得:
|
(13) |
由于联合图G是连通的,根据引理1,矩阵H=L+D正定,设定矩阵H的特征值0 < λ1 < λ2 < … < λN-1 < λN,可得式(14),其中,选取参数μ充分小即可满足μ < λ1.
|
(14) |
此外,
|
(15) |
结合式(13)~式(15),可得式(16):
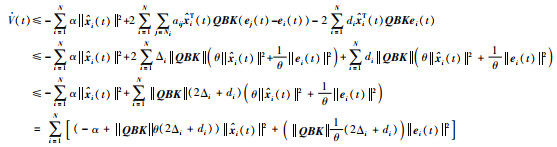
|
(16) |
定义触发条件为

|
(17) |
其中,

|
(18) |
将式(18)中的不等式代入式(17),可以得||ei(t)||≤
显然,当


|
结合定义式(7)和式(11),可得:

|
即多智能体系统在一致性协议控制下能够达到一致性.
前面证明了当触发条件满足式(36)时,定理1中所设计的自触发控制协议(4)可以实现领导—跟随多智能体系统(1)和系统(2)的一致性渐近跟踪.接下来说明智能体任意两次触发时间之间的关系(触发时刻的选取).
根据式(9)和式(12),可得式(19):

|
(19) |
其中,Φ见定理1中的定义.由于

|
(20) |
求解式(20)得:

|
(21) |
方程(17)和方程(21)中,对于||e(t)||从0到

|
(22) |
因此,触发时刻可以选取为

|
(23) |
为了证明触发时刻选取无误,还需要避除芝诺行为.在事件触发中,一段时间里,触发次数和时间都是有限的.对于芝诺行为的判定,具体到理论证明,即判断相邻两个时间触发时刻的间隔时间值是否为正数.
由式(6)可知,时间间隔:

|
所以可知,Δt>0严格成立,故间隔时间值为正数.满足式(23)选取的触发时刻不会发生芝诺(Zeno)行为.
3 仿真实例仿真实例的多智能体系统包括5个多智能体,系统拓扑网络如图 1所示,其中0代表领导智能体.

|
| 图 1 拓扑通信图 Fig.1 Topological communication diagram |
故图 1对应的系统拉氏矩阵和领导智能体邻接矩阵分别为
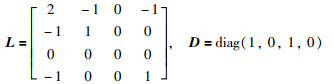
|
领导者和跟随者的动态方程分别满足方程(1)和方程(2),其中,

|
给定观测器反馈矩阵G和控制增益矩阵K:

|
考虑随机初始状态,选取参数α=2,θ=0.048 2,β1=β2=β3=β4=0.5,智能体系统的第1个状态和第2个状态跟踪曲线如图 2和图 3所示.

|
| 图 2 智能体系统第1个状态跟随曲线 Fig.2 The first states′ trajectories of agents′ system |

|
| 图 3 智能体系统第2个状态跟随曲线 Fig.3 The second states′ trajectories of agents′ system |
由图 2和图 3可知,任意初始条件下的一致性控制策略,都能够使得系统达成一致性且速度较快.
根据给出的触发时间条件,每个智能体的在自触发协议作用下的触发情况如图 4所示.

|
| 图 4 智能体自触发判断 Fig.4 Self-trigged judgment of agents |
由图 4可知,在自触发一致性策略控制下,各个智能体触发次数分别为23次、24次、33次和22次,这组实验数据充分说明自触发控制策略限定了触发条件,实现了非周期判断性触发.对比周期采样控制(40次),可知自触发策略可以有效减少触发次数.对硬件而言,控制策略降低了传感器和控制器的状态跟踪变化速率,进而延长硬件的使用寿命.
上述仿真结果表明,考虑自触发控制,带有观测器的一致性控制策略(4)能够实现跟随智能体对领导智能体的渐近跟踪,使系统达成一致性控制目标.
4 结论本文以减少系统信息交互数据量为出发点,提出一类自触发控制策略.首先,考虑到完全量测智能体状态的不可能性,为每个智能体设计了状态观测器;然后,根据观测器反馈数据设计控制协议,并给出了触发条件和触发时间的选取方法,最终达成多智能体系统一致性的控制目标.在今后的研究中,应考虑到变化拓扑图或非线性系统的情形,探索触发条件变化对一致性的影响,使研究更具现实意义.
| [1] | Saber O R, Murray R M. Consensus problems in networks of agents with switching topology and time-delays[J]. IEEE Transactions on Automatic Control, 2004, 49(9): 1520–1533. DOI:10.1109/TAC.2004.834113 |
| [2] | Fax J A, Murray R. Information fow and cooperative control of vehicle formations[J]. IEEE Transactions on Automatic Control, 2004, 49(9): 1465–1476. DOI:10.1109/TAC.2004.834433 |
| [3] | Li J Z, Ren W, Xu S Y. Distributed containment control with multiple dynamic leaders for double-integrator dynamics using only position measurements[J]. IEEE Transactions on Automatic Control, 2012, 57(6): 1553–1559. DOI:10.1109/TAC.2011.2174680 |
| [4] | Tang T, Liu Z X, Chen Z Q. Event-triggered formation control of multi-agent systems[C]//The 30th Chinese Control Conference. Piscateway, NJ, USA: IEEE, 2011: 4783-4786. |
| [5] | Saber O R, Murray R M. Consensus protocols for networks of dynamic agent[C]//American Control Conference. Piscateway, NJ, USA: IEEE, 2003: 951-956. |
| [6] |
杨洪金, 井元伟, 肇和平.
非线性系统观测器的设计:LMI方法[J]. 信息与控制, 2011, 40(4): 433–437.
Yang H J, Jing Y W, Zhao H P. Observer design for nonlinear systems:An LMI approach[J]. Information and Control, 2011, 40(4): 433–437. |
| [7] | Jia Y M. Robust control with decoupling performance for steering and traction of 4WS vehicles under velocity-varying motion[J]. IEEE Transactions on Control Systems Technology, 2000, 8(3): 554–568. DOI:10.1109/87.845885 |
| [8] | Xie G M, Liu H Y, Wang L, et al. Consensus in networked multi-agent systems via sampled control: fixed topology case[C]//American Control Conference. Piscateway, NJ, USA: IEEE, 2009: 3902-3907. |
| [9] | Jia Y M. Alternative proofs for improved LMI representations for the analysis and the design of continuous-time systems with polytopic type uncertainty:A predictive approach[J]. IEEE Transactions on Automatic Control, 2003, 48(8): 1413–1416. DOI:10.1109/TAC.2003.815033 |
| [10] | Dimarogonas D V, Frazzoli E, Johansson K H. Distributed event-triggered control for multi-agent systems[J]. IEEE Transactions on Automatic Control, 2012, 57(5): 1291–1297. DOI:10.1109/TAC.2011.2174666 |
| [11] | Meng X Y, Chen T W. Event based agreement protocols for multi-agent networks[J]. Automatica, 2013, 49(7): 2125–2129. DOI:10.1016/j.automatica.2013.03.002 |
| [12] | Zhang H, Feng G, Yan H C, et al. Observer-based output feedback event-triggered control for consensus of multi-agent systems[J]. IEEE Transactions on Industrial Electronics, 2014, 61(9): 4885–4894. DOI:10.1109/TIE.2013.2290757 |
| [13] | Zhang H, Feng G, Yan H C, et al. Distributed self-triggered control for consensus of multi-agent systems[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 40–45. DOI:10.1109/JAS.2014.7004618 |
| [14] | Wu M M, Zhang H, Yan H C. Self-triggered output feedback control for consensus of multi-agent systems[J]. Neurocomputing, 2016, 190(5): 179–184. |
| [15] | Fan Y, Yang J Y. Average consensus of multi-agent systems with self-triggered controllers[J]. Neurocomputing, 2016, 177(2): 33–36. |
| [16] | Almeida J, Silvestre C. Synchronization of multiagent systems using event-triggered and self-triggered broadcasts[J]. IEEE Transactions on Automatic Control, 2017, 62(9): 4741–4746. DOI:10.1109/TAC.2017.2671029 |
| [17] | Dolk V S, Tesi P. Event-triggered control systems under denial-of-service attacks[J]. IEEE Transactions on Control of Network Systems, 2017, 4(1): 93–105. DOI:10.1109/TCNS.2016.2613445 |
| [18] | Senejohnny D, Tesi P, Persis C D. A jamming-resilient algorithm for self-triggered network coordination[J]. IEEE Transaction on Control of Network Systems, 2018, 5(3): 981–990. DOI:10.1109/TCNS.2017.2668901 |
| [19] | Deng C, Yang G H. Leaderless and leader-following consensus of linear multi-agent systems with distributed event-triggered estimators[J]. Journal of the Franklin Institute, 2019, 356(1): 309–313. DOI:10.1016/j.jfranklin.2018.10.001 |
| [20] | Hu J P, Cheng G R, Li H Y. Distributed event-triggered tracking control of second-order leader-follower multi-agent systems[C]//The 30th Chinese Control Conference. Piscateway, NJ, USA: IEEE, 2011: 4819-4824. |
| [21] | Cheng L, Wang Y P, Hou Z, et al. Sampled-data based average consensus of second-order integral multi-agent systems:Switching topologies and communication noises[J]. Automatica, 2013, 49(5): 1458–1462. DOI:10.1016/j.automatica.2013.02.004 |
| [22] | Li Z K, Ren W, Liu X D. Distributed consensus of linear multi-agent systems with adaptive dynamics protocol[J]. Automatica, 2013, 49(5): 1986–1995. |
| [23] | Hu S L, Yue D. Observer-based event-triggerd control for networked linear systems subject to denial-of-service attacks[J/OL]//IEEE Transactions on Cybernetics. (2019-03-25)[2019-05-01]. https://ieeexplore.ieee.org/document/8673781. |
| [24] | Qian Y Y, Liu L. Output consensus of heterogeneous linear multi-agent systems with adaptive event-triggered control[J]. IEEE Transactions on Automatic Control, 2019, 64(6): 2606–2613. DOI:10.1109/TAC.2018.2868997 |
| [25] |
胡洲, 王志胜.
一类非线性离散系统的鲁棒信息融合控制[J]. 信息与控制, 2014, 43(5): 578–582.
Hu Z, Wang Z S. Robust information fusion control for a class of nonlinear discrete-time systems[J]. Information and Control, 2014, 43(5): 578–582. |