



0 引言
模型预测控制(model predictive control,MPC)作为一种基于模型的计算机控制算法,由于其优秀的预测和优化性能,自发展以来就取得了大量的研究成果[1-3].其中预测模型采用状态空间的形式可以更清晰地表示出系统内部关系,便于分析和设计.因此,基于状态空间模型的预测控制(state space model predictive control,SSMPC)便得到了许多学者的关注.在SSMPC的基础上,为了避免设计状态观测器带来的负担,Young等人首先提出了基于非最小状态空间模型的预测控制算法(non-minimum state space model predictive control,NMSSMPC)[4]. NMSSMPC采用输入输出变量的历史值作为系统的状态变量,可以避免状态观测器的设计,该模型既有传递函数特性又兼具基于状态空间设计的优点.他们最早将非最小状态空间(non-minimum state space,NMSS)模型应用在比例积分加(proportional-integral-plus,PIP)控制中.随后,一些学者在NMSSMPC的基础上提出了许多改进的控制方法[5-7].文[8]则在非方多变量这种系统中采用基于NMSS模型的控制策略.
虽然现有的NMSSMPC的研究成果已经在很多领域中都得到了成功的应用,但这些研究在建立系统模型时往往忽略掉干扰项,而实际控制过程中扰动却是不可避免的,并时常伴有模型失配的情况,这必然会导致系统的控制性能受到影响.为此,许多方法通过扰动补偿策略来克服干扰对系统性能的影响.其中,扰动观测器(disturbance observer,DOB)设计原理简单并且不依赖扰动的精确模型,可以处理不可测干扰,有效地估计外部干扰和系统的内部扰动,并将这些估计干扰以前馈补偿方式对其进行抑制. DOB作为一种有效处理系统中的各种干扰方法,已被广泛应用于各类控制系统中[9-15].文[9]提出一种基于模糊干扰观测器的输出反馈控制方法,并应用于永磁同步电动机的速度控制.文[10]提出了一种鲁棒飞行控制策略,通过将DOB和神经网络相结合来处理参数不确定和外部干扰对高超声速飞行器的影响.文[11]提出一种径向基神经网络DOB方法,对永磁同步电动机外部干扰和由参数变量引起的内部干扰进行估计,并将估计值作为前馈补偿.文[12]研究了一类基于非线性干扰观测器的多输入多输出非线性不确定系统的边界层自适应滑模控制方法,并应用于近空间飞行器高精度姿态控制.文[13]针对不匹配系统,采用扩展的DOB来估计系统的干扰,将其用于2自由度串联柔性关节机械手的控制.文[14]中所提出的抗干扰控制策略也是基于干扰观测器的,关键在于对含有干扰的类似随机系统设计出一种基于DOB方法的随机自适应观测器.文[15]提出一种基于非线性干扰观测器的轨迹跟踪控制方法,并应用于直升飞机系统.文[16-21]给出了MPC+DOB控制结构的设计方法及实现.文[16]针对具有死区时间的过程,提出了改进的干扰观测器与MPC相结合的干扰抗拒方法.文[17]针对不确定线性多变量系统,提出一种基于DOB的保证系统内部稳定性的控制方案.文[18-19]提出了一种基于DOB的改进的预测函数控制方法,并用于永磁同步电动机的速度控制.文[20]针对进入火星大气层轨道跟踪问题,提出了一种复合控制策略,MPC作为反馈控制器来优化跟踪轨迹,DOB作为前馈控制器来克服外部干扰和系统内部不确定性的影响.文[21]将MPC+DOB方法用于四旋翼飞行器系统.然而,上述方法是简单控制模式,即“前馈补偿+反馈控制”的模式.这种控制模式会引起一些缺点.首先,这种复合的“前馈补偿+反馈控制”的模式仅仅是两种控制效果的简单叠加,将会导致控制的饱和并且影响系统的控制性能.另外,基于干扰估计的前馈补偿没有参与到滚动时域优化,将会引起控制性能的丢失.再者,预测模型中没有包含干扰的估计值,无法保证模型的精度,从而使得通过求解价值函数获得系统控制律是次优的.
为此,本文提出了一种基于扰动观测器的多变量非最小状态空间预测控制算法(disturbance observer-based multivariable non-minimum state space predictive control,D-MNMSSPC).区别于以往的MPC+DOB方法采用“前馈补偿+反馈控制”的控制模式,该方法通过DOB对系统的集总干扰(外部扰动及模型失配、变量间耦合导致的内部扰动)进行估计,将估计值和系统的输出值同时扩展到MNMSS模型中构成基于DOB的复合预测模型并直接参与预测控制滚动优化,从而保证系统在存在扰动时仍能达到最优输出.重油分馏塔仿真结果表明验证了本文所提出的复合控制策略的有效性和可行性.
1 D-MNMSSPC控制策略分析和设计 1.1 MPC+DOB控制策略在实际的工业过程控制中,系统模型通常由阶跃测试得到,并将过程通道模型表示成一阶加纯滞后的形式.假设一类带有时滞、扰动的离散多输入多输出(multi-input multi-output,MIMO)被控过程有q个输入p个输出,系统方程表示为

|
(1) |
其中,y(k)=[y1(k),…,yp(k)]T为被控变量;u(k)=[u1(k),…,uq(k)]T为操纵变量;G(z)是p×q维传递函数,

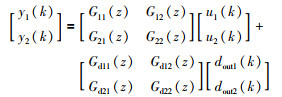
针对式(1)所示的系统,单独的MPC策略不能直接有效地对干扰进行抑制,为此,许多文献在MPC的基础上加入DOB(简写MPC+DOB)来提高系统的抗扰性能.这些方法是直接的,MPC作为反馈控制器来实现设定值的跟踪,DOB的设计作为前馈控制器来补偿集总干扰的影响.通过具有稳态增益为1的低通滤波器来设计DOB,从而来权衡系统的鲁棒性和抗干扰的特性.通过选择合适的低通滤波器,在低频段来抑制外部和内部干扰,在高频段来消除测量噪声.以两输入两输出过程为例,可以表示为

|
(2) |
对于式(2),可以看出y1(k)受u1(k)控制,并受u2(k)和外部扰动Dout1(k)的影响.同样地,y2(k)受u2(k)控制,并受u1(k)和外部扰动Dout2(k)的影响.以u1→y1回路为例设计DOB(u2→y2回路设计与u1→y1相似),控制策略结构如图 1(a)所示.从图 1(a)可以看出,y1w(k+1)=σy1(k)+(1-σ)w为参考轨迹,是预测时域内的系统输出到设定值之间的一个光滑过渡(w为设定值,








|
| 图 1 MPC+DOB控制策略结构 Fig.1 Structure of MPC+DOB control strategy |
由图 1(b)知,系统的集总干扰Dtol1(k)为

|
(3) |
且

|
(4) |

|
(5) |

|
(6) |
因此,y1(k)可以表示为
|
(7) |
通过图 1中DOB的设计,可知集总干扰的估计值为

|
(8) |
方程(7)代入(8),有:

|
(9) |
定义1 干扰估计误差Ed1(k)为集总干扰Dtol1(k)与其估计值

|
假设1 闭环系统通过前馈加反馈的控制器中的反馈部分达到稳定,且集总干扰存在一个有界稳定值,满足:

|
由式(9)和定义1,有:

|
(10) |
根据离散系统的终值定理可得:
|
(11) |
显然,当Q1(z)为理想的低通滤波器,即Q1(z)的稳态增益为1且满足假设1时,有
根据式(3)~(11)的分析,MPC+DOB的控制策略可以实现对干扰的抑制,但这种控制结构中基于MPC的跟踪性能和基于DOB的干扰抑制性能的设计是相互独立的,只是两种方案的简单叠加,会引起控制饱和,干扰并未真正地参与到优化中,因此不能保证系统的预测输出是最优.为此,如何将DOB引入到MNMSSMPC的控制中是本文所要解决的问题.
1.2 基于DOB的复合MNMSS预测模型为了克服MPC与DOB分别独立设计松散耦合的弊端,本文采取一种改进的控制策略,即:基于DOB的复合MNMSS预测模型方法.主要思路为:将干扰Dtol(k)的估计值即




|
| 图 2 D-MNMSSPC策略内部结构 Fig.2 Internal Structure of D-MNMSSPC |
考虑将集总干扰引入到系统中并把系统方程表示成如下差分方程的形式:

|
(12) |
其中,Gα,α=1,2,…,ny,Hβ,β=1,2,…,nu为阶跃响应采样值,分别是p×p和p×q维的矩阵,ny,nu为模型输入和输出的阶数,Dtol(k)=[Dtol1(k),…,Dtolp(k)].
左右两边同乘以Δ,则式(12)的增量形式为

|
(13) |
其中,Δ=1-z-1是差分算子,起减小误差的作用.
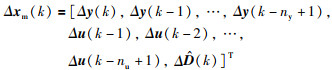
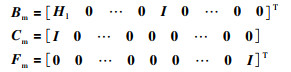
将扰动的估计值引入到状态变量中,取非最小状态向量Δxm(k)为
|
(14) |
其中,状态向量维数m=dim(Δxm)=p×ny+q(nu-1),
根据式(13),式(14)可以表示成:

|
(15) |
结合式(12)与式(15),得到系统预测输出为
|
(16) |
其中,
|
|
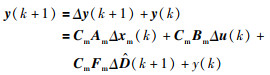
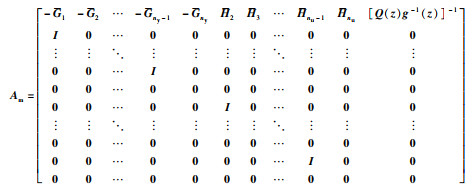
进一步将输出变量y(k)引入到状态变量中,得到复合MNMSS模型为

|
(17) |
其中,

在预测时域P内,动态模型
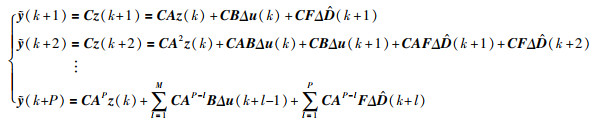
|
(18) |
其中,
其向量形式为

|
(19) |
如式(19)所示,系统的预测输出与当前状态x(k)、控制向量ΔU和扰动观测值
其中,
|
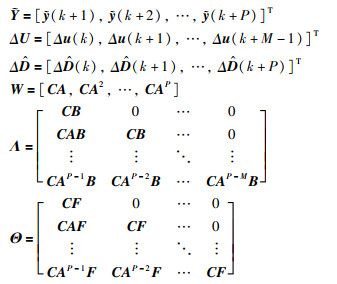
针对以上复合MNMSS预测模型选取如下形式的二次型性能指标函数,为
|
(20) |
其中,yw(k+j)=[y1w(k+j),…,ypw(k+j)],M为控制时域;Qj,Rδ>0分别是参考轨迹与预测输出之间差值、控制输入的加权矩阵.
根据式(16),将式(20)表示成如下的向量形式:

|
(21) |
其中,Yw=[yw(k+1),yw(k+2),…,yw(k+P)]T ,Q=diag[Q1 Q2 … QP],R=diag[R1 R2 … RM].
注 在式(21)中,优化变量是


令

|
(22) |
令:
|
则(22)式可表示成

|
(23) |
根据MPC滚动优化原理,系统只实施当前时刻的控制增量Δu(k),下一刻的控制增量会被重新计算.当前时刻系统的控制增量为

|
(24) |
则系统当前的控制作用为

|
(25) |
从式(19)可以看出,干扰估计值增量

重油催化裂化分馏塔是一种典型的多变量、大时滞、和强扰动的控制过程,是整个重油催化裂化装置中至关重要的一个环节.如图 3所示,分馏塔顶端设有冷凝器.塔釜则装有再沸器,通过调节蒸汽流量控制热量的转移.一般情况下,重油分馏塔有7个被控变量,3个控制量,2个扰动量,本文从原始系统模型中抽出一个2*2的方阵作为研究对象,主要针对顶部和侧线产品浓度两个被控变量进行仿真研究.在平衡点附近,重油分馏塔的系统模型为
|
(26) |

|
| 图 3 重油催化裂化分馏塔结构图 Fig.3 Structure of Heavy Oil Catalytic Cracking Fractionator |
其中,控制量MV包括顶部抽出流量u1和侧线抽出流量u2;被控量CV包括顶部产品浓度y1和侧线产品浓度y2;外部扰动量DV包括中段回流量dout1和顶部回流量dout2.
标称情况下被控对象的动态离散模型为
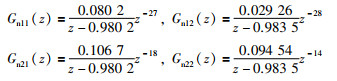
|
假设系统受到阶跃扰动的影响,并通过干扰通道作用于过程中,取扰动通道模型为
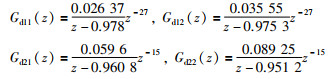
|
经过反复的试验,得到如下最佳优化参数:Ts=1 s,Tr=0.9,P=35,M=10;MNMSSPC控制策略下的加权矩阵为Qjmpc=diag[0.1,0.05](j=1,2,…,35),Rδmpc=diag[0.8,0.8](δ=1,2,…,10),Qmpc=diag[Q1mpc,Q2mpc,…,Q35mpc],Rmpc=diag[R1mpc,R2mpc,…,R10mpc];MPC+DOB[16]控制策略下的加权矩阵为Qjmpc1=diag[0.3,0.08](j=1,2,…,35),Rδmpc1=diag[0.5,0.5](δ=1,2,…,10),Qmpc=diag[Q1mpc1,Q2mpc1,…,Q35mpc1],Rmpc=diag[R1mpc1,R2mpc1,…,R10mpc1];D-MNMSSPC控制策略下的加权矩阵为Qjproposed=diag[400,1 200](j=1,2,…,35),Rδproposed=diag[200,100](δ=1,2,…,10),Qproposed=diag[Q1proposed,Q2proposed,…,Q35proposed],Rproposed=diag[R1proposed,R2proposed,…,R10proposed].
为了验证所提方法(D-MNMSSPC)的有效性,首先将其与MNMSSPC控制策略进行仿真对比,并在相同的条件下将其与MPC+DOB的控制策略进行仿真对比.通过在不同的时间点加入(或改变)扰动来观察系统的响应情况,仿真结果如图 4~8所示.其中图 4显示了在模型标称和失配两种情况下,D-MNMSSPC与MNMSSPC两种控制策略下系统的输出响应曲线,相应的控制量变化情况在图 5中给出;图 6则显示了在模型标称和失配两种情况下,D-MNMSSPC与MPC+DOB两种控制策略下系统的输出响应曲线,相应的控制量变化情况在图 7中给出;图 8是D-MNMSSPC控制策略下外部扰动及其在被控变量上作用后的估计值.

|
| 图 4 D-MNMSSPC策略和MNMSSPC策略下被控变量的输出响应曲线(包括模型标称和模型失配两种情况) Fig.4 Output response curves of controlled variables under D-MNMSSPC and MNMSSPC (Including model nominal and model mismatch) |

|
| 图 5 D-MNMSSPC策略和MNMSSPC策略下控制量变化的曲线(包括模型标称和模型失配两种情况) Fig.5 Curves of control volume change under D-MNMSSPC and MNMSSPC (Including model nominal and model mismatch) |

|
| 图 6 D-MNMSSPC策略和MPC+DOB策略下被控变量的输出响应曲线(包括模型标称和模型失配两种情况) Fig.6 Output response curves of controlled variables under D-MNMSSPC and MPC+DOB (Including model nominal and model mismatch) |

|
| 图 7 D-MNMSSPC策略和MPC+DOB策略下控制量变化的曲线(包括模型标称和模型失配两种情况) Fig.7 Curves of control volume change under D-MNMSSPC and MPC+DOB (Including model nominal and model mismatch) |

|
| 图 8 模型标称和模型失配下干扰真实值和估计值的响应曲线 Fig.8 Response curves of disturbance real value and estimated value of Model nominal and Model mismatch |
1) 模型标称的情况:即Gnij(z)=Gij(z)
在t=100 s时增加20%的dout1(k),并t=600 s在减小20%的dout2(k);从图 4可以看出,本文所提方法与MNMSSPC控制策略相比收敛速度快,跟踪能力强,并且无超调量;从图 5可以看出,本文所提方法与MNMSSPC这种预测控制策略相比波动小,具有更好的动态性能.所以本文所提方法要比MNMSSPC这种预测控制策略更好.从图 6可以看出,本文所提方法能够有效跟踪参考值,而MPC+DOB控制策略收敛速度慢而且有超调量;从图 7可以看出,本文所提方法与MPC+DOB控制策略相比能够快速回稳,波动小,效果比较好.所以本文所提方法要比MPC+DOB这种控制策略更好.对比图 4~7可知,MPC+DOB控制策略收敛速度快,并且出现轻微超调量,控制效果较好,而MNMSSPC控制策略收敛速度慢,超调量比较明显,控制效果较差,所以MPC+DOB控制策略比MNMSSPC控制策略更好.
2) 模型失配的情况:即Gnij(z)≠Gij(z)
模型失配包括增益失配,滞后时间不同等很多情况,从而导致过程模型与标称模型存在偏差,本文取过程模型的传递函数为
|
在系统中加入与模型标称情况相同的干扰条件并进行仿真.从比较结果中同样可以看出,MPC+DOB控制策略控制要比MNMSSPC控制策略更稳定,速度快,超调量小;而D-MNMSSPC方法比MNMSSPC和MPC+DOB控制策略响应速度更快,跟踪能力和控制性能更好.
图 8为D-MNMSSPC控制策略下模型标称和模型失配时的干扰真实值和估计值的响应曲线,其中黑色虚线为扰动的真实值,蓝色为模型失配下的估计值,黑色实线为模型标称下的估计值.从图中可以看出,扰动的真实值与估计值之间误差很小,这说明采用D-MNMSSPC的控制策略可以对干扰进行有效的估计.
综上,本文所提出的D-MNMSSPC控制策略可以对扰动进行有效的估计,并适当抵消掉,从而优化系统输出,使系统对干扰进行有效的抑制.
3 结论多变量、时滞和强扰动等因素都会使重油分馏塔的控制性能变差.本文在预测控制的基础上,提出了一种基于扰动观测器的复合控制策略(D-MNMSSPC).将集总干扰引入到预测模型中参与滚动优化,提高了被控系统对干扰的抑制能力.仿真结果表明,本文所提出的控制策略不仅可以有效抑制外部扰动,还可以抑制由模型失配和变量间耦合引起的内部扰动,具有良好的控制品质.
| [1] | Camacho D E F, Bordons D C. Model predictive control[M]. London, UK: Springer, 2007: 575-615. |
| [2] | Shi H Y, Su C L, Cao J T, et al. Nonlinear adaptive predictive functional control based on the Takagi-Sugeno model for average cracking outlet temperature of the ethylene cracking furnace[J]. Industrial Engineering Chemistry Research, 2015, 54(6): 1849–1860. DOI:10.1021/ie503531z |
| [3] | Shi H Y, Li P, Wang L M, et al. Delay-range-dependent robust constrained model predictive control for industrial processes with uncertainties and unknown disturbances[J]. Complexity, 2019: 1–15. |
| [4] | Peter Y, Behzadi M A, Wang C L, et al. Direct digital and adaptive control by input-output state variable feedback pole assignment[J]. International Journal of Control, 1987, 46(6): 1867–1881. DOI:10.1080/00207178708934021 |
| [5] | Wang L P, Young P C. An improved structure for model predictive control using non-minimal state space realization[J]. Journal of Process Control, 2006, 16(4): 355–371. DOI:10.1016/j.jprocont.2005.06.016 |
| [6] | Zhang R D, Cao Z, Bo C, et al. New PID controller design using extended nonminimal state space model based predictive functional control structure[J]. Industrial and Engineering Chemistry Research, 2014, 53(8): 3283–3292. DOI:10.1021/ie403924p |
| [7] |
宋英莉, 刘宣宇.
带有可调因子的NMSSPC算法的研究[J]. 控制工程, 2016, 23(9): 1443–1447.
Song Y L, Liu X Y. Research of NMSSPC algorithm with an adjustable factor[J]. Control Engineering, 2016, 23(9): 1443–1447. |
| [8] | Khalilipour M M, Sadeghi J, Shahraki F, et al. Nonsquare multivariable non-minimal state space-proportional integral plus (NMSS-PIP) control for atmospheric crude oil distillation column[J]. Chemical Engineering Research and Design, 2016, 113: 140–150. DOI:10.1016/j.cherd.2016.07.018 |
| [9] | Kim E, Lee S. Output feedback tracking control of MIMO systems using a fuzzy disturbance observer and its application to the speed control of a PM synchronous motor[J]. IEEE Transactions on Fuzzy Systems, 2005, 13(6): 725–741. DOI:10.1109/TFUZZ.2005.859306 |
| [10] | Chen M, Chang S J, et al. Disturbance observer based robust flight control for hypersonic vehicles using neural networks[J]. Journal of Computational and Theoretical Nanoscience, 2011, 4(4): 1771–1775. |
| [11] | Li J, Li S, Chen X. Adaptive speed control of PMSM servo system using a RBFN disturbance observer[J]. Transactions of the Institute of Measurement & Control, 2012, 34: 615–626. |
| [12] |
于靖, 陈谋, 姜长生.
基于干扰观测器的非线性不确定系统自适应滑模控制[J]. 控制理论与应用, 2014, 31(8): 993–999.
Yu J, Chen M, Jiang C S. Adaptive sliding mode control for nonlinear uncertain systems based on disturbance observer[J]. Control Theory and Applications, 2014, 31(8): 993–999. |
| [13] | Ginoya D, Shendge P D, Phadke S B. Delta-operator-based extended disturbance observer and its applications[J]. IEEE Transactions on Industrial Electronics, 2015, 62(9): 5817–5828. DOI:10.1109/TIE.2015.2450715 |
| [14] |
魏新江, 张林青.
一类随机系统基于干扰观测器的抗干扰控制[J]. 控制与决策, 2017, 32(5): 939–942.
Wei X J, Zhang L Q. Anti-disturbance control for a stochastic systems with disturbances based on disturbance observer[J]. Control and Decision, 2017, 32(5): 939–942. |
| [15] | Zarei A, Poutari M S, Barakati S M. Trajectory tracking for two-degree of freedom helicopter system using a controller-disturbance observer integrated design[J]. Isa Transactions, 2018, 74: 99–110. DOI:10.1016/j.isatra.2017.12.026 |
| [16] | Yang J, Li S, Chen X, et al. Disturbance rejection of dead-time processes using disturbance observer and model predictive control[J]. Chemical Engineering Research and Design, 2011, 89(2): 125–135. DOI:10.1016/j.cherd.2010.06.006 |
| [17] |
于哲, 王璐, 苏剑波.
基于干扰观测器的不确定线性多变量系统控制[J]. 自动化学报, 2014, 40(11): 2643–2649.
Yu Z, Wang L, Su J B. Disturbance observer based bontrol for linear multi-variable system with uncertainties[J]. Acta Automatica Sinica, 2014, 40(11): 2643–2649. |
| [18] | Wang S, Fu J Y, Yang Y, et al. An improved predictive functional control with minimum-order observer for speed control of permanent magnet synchronous motor[J]. Journal of Electrical Engineering & Technology, 2016, 12(1): 1921–1932. |
| [19] | Li S H, Liu H X, Fu W S. An improved predictive functional control method with application to PMSM systems[J]. International Journal of Electronics, 2017, 104(1): 126–142. DOI:10.1080/00207217.2016.1196743 |
| [20] | Wu C, Yang J, Li S H, et al. Disturbance observer based model predictive control for accurate atmospheric entry of spacecraft[J]. Advances in Space Research, 2018, 61: 2457–2471. DOI:10.1016/j.asr.2018.02.010 |
| [21] | Khalifa A, Fanni M, Namerikawa T. MPC and DOB-based robust optimal control of a new quadrotor manipulation system[C]//Proceedings of the Control Conference. Piscataway, NJ, USA: IEEE, 2017: 483-488. |