



2. 东北大学信息科学与工程学院, 辽宁 沈阳 110819;
3. 中国科学院网络化控制系统重点实验室, 辽宁 沈阳 110016;
4. 中国科学院沈阳自动化研究所, 辽宁 沈阳 110016;
5. 中国科学院机器人与智能制造创新研究院, 辽宁 沈阳 110169
2. School of Information Science and Engineering, Northeastern University, Shenyang 110819, China;
3. Key Laboratory of Networked Control Systems, Chinese Academy of Sciences, Shenyang 110016, China;
4. Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China;
5. Institutes for Robotics and Intelligent Manufacturing, Chinese Academy of Sciences, Shenyang 110169, China
0 引言
大容量新能源(风能,光伏)并网发电系统的接入给电网稳定性带来了巨大的挑战[1-3].当电网发生电压跌落故障时,并网系统的脱网运行造成的瞬时功率切除会对电网造成巨大的冲击.因此新能源并网发电系统必须具备低电压穿越能力,即在电网跌落故障期间保持并网运行[4-5].
目前有关低电压穿越控制策略的研究已经取得了较大进展.文[6]提出一种基于电压定向矢量控制策略,实现了有功无功功率的独立解耦,并利用卸荷电路来消除直流母线上累积的功率,防止直流母线过电压,但没有考虑电压不对称故障的情况.且在dq坐标系下的逆变器数学模型需要引入前馈解耦控制,增大了系统设计难度.文[7]提出一种基于准比例谐振控制的低电压穿越控制策略,其在αβ坐标系下进行控制器参数设计,无需引入前馈解耦环节,简化了系统设计.文[8]通过设计分时作用的电压环来稳定光伏系统的输出,防止直流母线过电压,实现了正常工况和故障工况的无缝切换.文[9]提出一种基于空间矢量傅里叶变换的低电压穿越控制方法,通过注入无功功率来支撑电网电压的恢复,但该方法仅仅考虑正序电流注入,并未考虑到直流母线电压波动的影响.且并未应用于目前工程中广泛使用的两级式并网系统拓扑.文[10]提出一种基于三相四桥臂拓扑的无功功率注入方法来实现并网逆变器的低电压穿越.文[11-12]提出基于模型预测控制的低电压穿越控制方法,同传统的PI控制相比,其响应速度增加,但容易受到逆变器开关频率的限制,且没有考虑到电网频率偏移对控制系统稳定性的影响.文[13]提出带有功率补偿的限流模型预测直接功率控制,通过储能系统消纳直流母线上的累积功率,实现入网功率及负序电流的灵活控制,同时也降低了并网电流的谐波畸变率,但其利用T/4延时法进行电压跌落深度检测时,没有考虑到电网频率偏移对检测结果的影响.为了实现并网发电系统的稳定运行,并网电流必须与电网电压同步,即实现基波电压正序分量的准确跟踪.在不对称故障下,文[14-18]提出了基于锁相环结构的负序分量消除方法来实现电网信号同步,但考虑到谐波消除问题时配置的多级联滤波多级联滤波结构造成了很大的系统延时,且为了消除频率偏移的影响引入的自适应结构增加了控制系统的复杂度.
综上所述,本文提出了两级式光储并网逆变器在电网电压跌落,混有谐波,直流分量以及频率偏移的混合故障工况下的综合控制策略.在αβ坐标系下建立基于电压前馈准比例谐振控制的双闭环控制模型,以抑制负序电流为主要控制目标,利用储能系统消纳直流母线的冗余功率,保证并网电流质量和直流母线电压的稳定.针对电网不对称故障,提出了一种基于改进锁相环结构的电网信号同步方法,不仅具有更短的延时时间,同时通过在环路内增加相位幅值补偿装置来实现复杂工况下电网信号的准确同步.故障期间采用无功优先控制策略支撑电网电压的恢复,保证低电压穿越过程的快速性和平稳性,通过仿真实验验证了所提策略的有效性.
1 电网故障下逆变器控制目标分析不对称跌落故障下,逆变器输出的复功率为

|
(1) |
由瞬时无功理论可得,在dq坐标系下,逆变器输出的有功功率P0和无功功率Q0分别为
|
(2) |
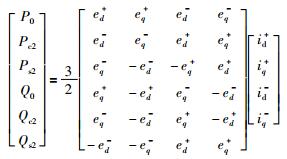
联立式(1)、式(2)展开得:

|
(3) |
式中,P0,Q0为逆变器输出瞬时有功和无功功率的平均值,Ps2,pc2,Qs2,Qc2为有功功率和无功功率的正余弦震荡项.
联立式(1)~式(3)并忽略耦合项系数得:
|
(4) |
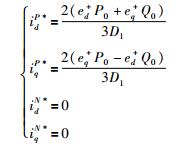
由于式(4)中的计算矩阵不可逆,若要求得等式右侧4个电流变量的取值,必须要对等式左侧的6个功率参数进行取舍,进而得到电流变量的参考值.由于新能源并网发电系统多配有储能装置,可以平抑有功功率波动,维持直流母线电压稳定.为了确保并网系统的稳定运行,选取抑制负序电流为主要控制目标,即在式(4)中令:

|
(5) |
计算得到电流参考指令为
|
(6) |
式中,D1=(edP)2+(eqP)2.
2 电网信号同步 2.1 光伏并网发电系统低电压穿越要求光伏电站低电压穿越导则示意图如图 1所示.

|
| 图 1 光伏系统低电压穿越要求 Fig.1 Photovoltaic system low voltage ride through requirements |
当并网点电压跌落至图 1中红色曲线下方时,光伏系统可以脱离并网状态运行,当并网点电压位于红色曲线上方时,光伏电站应该保持并网运行.
同时根据电压跌落深度的不同,逆变器也要发出一定量的无功功率支撑电网电压的恢复.电压跌落期间所需补偿无功电流的大小和电压跌落深度的关系如图 2所示.

|
| 图 2 故障穿越期间所需无功电流 Fig.2 Reactive current required during fault crossing |
故障期间,为了保证并网逆变器能够向电网输送高质量的电能,并根据调度需要灵活控制入网有功及无功功率的大小,并网逆变器的电流必须与接入电网的电压同步.锁相环(phase-locked loop,PLL)由于其简单化的结构及控制的便捷被广泛地应用于电网信号同步控制中.其中应用最广泛的是基于PI控制器的同步旋转坐标系的锁相环结构(synchronous rotating frame PLL,SRF-PLL)[19].目前实现并网同步的锁相环均为Type-2型锁相环(线性化模型的开环传递函数在原点处有2个极点).同Type-2型锁相环相比,准1型(Quasi-Type-1,QT1)锁相环QT1-PLL在其环路中只有一个积分单元,具有更高的稳定裕度,其结构如图 3所示[20].

|
| 图 3 QT1-PLL结构图 Fig.3 Block diagram of QT1-PLL |
如图 3所示,电网电压经Park变换后的q轴分量与比例增益k相乘得到频率偏差Δω0,与给定角频率ωff相加得到锁相环输出的角频率ω0,通过积分环节得到电网的相位角[20].经过滤波后的d轴电压u′d即为基波正序电压信号.
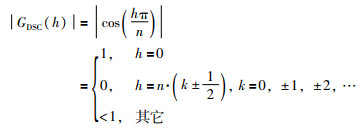
当电网电压中含有谐波分量和直流分量以及发生不对称跌落故障时会对电网信号同步检测的结果产生影响,由于电网中主要含有-5,+7,-11,+13,…次谐波,且dq坐标系相对于abc坐标系以额定角频率ω旋转,abc坐标系下的谐波分量对应于dq坐标系下的直流,±6,±12,…次谐波成分.因此本文选用级联延时信号消除(delayed signal cancellation,DSC)和滑动平均滤波(moving average filter,MAF)级联配置的方法来实现dq坐标系下谐波的消除.文[21]中介绍了有关DSC和MAF滤波的原理:
|
(7) |
|
(8) |
本文选取n=4,Tω=T/12组成级联滤波结构,级联滤波的幅频特性如图 4所示.

|
| 图 4 级联滤波器的幅频特性 Fig.4 Amplitude-frequency characteristics of cascade filters |
由图 4可得级联滤波结构可以有效地滤除电网谐波成分,以及二倍频波动的负序分量.但当输入电压信号混有直流分量时,无法进行有效的滤波.因此引入自适应陷波器(adaptive notch filter,ANF)来消除直流分量的影响.
ANF的传递函数表达式为
|
(9) |
式中,ωr为陷波频率值,a为阻尼系数.
由于直流分量在dq坐标系下表现为-1次谐波,因此选取ωr=100π rad/s.不同阻尼因子下的ANF的波特图如图 5所示.

|
| 图 5 ANF波特图 Fig.5 Bode diagram of ANF |
由图 5可见,直流分量被完全消除,兼顾动静态性能,a取为0.7[14].级联滤波结构的幅频相频特性如图 6所示.

|
| 图 6 级联滤波器的幅频相频特性 Fig.6 Magnitude and phase response of the cascaded filter model |
由图 6可知级联滤波器对基波信号的幅值为1,对谐波成分呈衰减特性,可以消除基波负序分量以及直流分量的影响.但在频率偏移的条件下锁相环的检测结果会受到影响.令频率偏移条件下电网电压相位角为θi,角频率为ωi.此时dq坐标系下的电压分量为
|
(10) |
在式(10)中,令θn=θi-θ0,结合图 2得到:
|
(11) |
式中,θn为相位误差,Δωi表示了角频率的数值随电网频率的变化.
由式(11)得,相位误差不仅和锁相环的比例增益k有关,还和基波电压幅值Um有关,当电压幅值变化时,相位误差会随之改变,因此必须消除Um对相位检测误差的影响.
当锁相环系统稳定时,有:
|
(12) |
联立式(10)~式(12)得:
|
(13) |
由式(13)得,将滤波后的电压分量u′d,u′q进行反正切运算即可消除基波电压幅值Um对相位检测误差的影响.
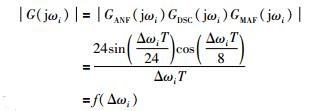
令频率偏移时的角频率ωi=ω0+Δωi,ω0为基波角频率.由于dq坐标系相对于abc坐标系以额定角频率ω0旋转,abc坐标系下的h次谐波对应于dq坐标系下的h-1次谐波.频率偏移条件下的级联滤波器的幅值为
|
(14) |
同理得到级联滤波器的相位为
|
(15) |
由式(14)、式(15)得到频率偏移条件下的级联滤波器的幅值响应曲线如图 7所示.文[17]和文[22]中的两种级联滤波器的幅频相频特性加入对比.

|
| 图 7 频率偏移条件下滤波器幅值相位响应 Fig.7 Magnitude and phase response of the filter under frequency offset |
由图 7可知,当频率偏移时,滤波器的幅值和相位发生改变,本文提出的滤波结构的幅值相位偏移小于其它两种对比结构.为了彻底消除频率偏移影响,在锁相环路中加入相位和幅值补偿.加入幅值相位补偿的级联滤波锁相环的结构如图 8所示.

|
| 图 8 加入幅值相位补偿的级联滤波锁相环结构图 Fig.8 Cascaded filter phase-locked loop construction diagram with added amplitude and phase compensation |
由图 9所示结构建立系统建立小信号模型.其对应的开环传函为

|
| 图 9 锁相环小信号模型 Fig.9 Small signal model of the proposed PLL |
|
(16) |
式中,H(s)为级联滤波器的传递函数.
应用文[21]中的一阶Pade近似的方法将级联滤波器的延时环节做如下等效:
|
(17) |
为了保证系统的稳定,通常相位裕度(phase margin,PM)的数值保持为45°.结合式(16)、式(17)可得,PM数值的大小仅和比例增益k有关,作出与PM和k关系曲线如图 10所示.

|
| 图 10 PM与k的关系曲线 Fig.10 The function curve between PM and k |
由图 10可得k=60.28时PM=45°,因此选择比例增益k的数值为60.28.
3 低电压穿越控制策略 3.1 基于电压分层的光伏系统变功率轨迹跟踪控制策略当电网电压不对称跌落时,由功率平衡方程得:
|
(18) |
式中,PPV为光伏系统输出功率.
由式(18)得:直流侧电容累积的不平衡功率会导致直流母线电压的升高.通常光伏并网发电系统配有储能设备来消耗直流侧冗余的功率.但当电压跌落深度较大时,储能设备无法快速消耗冗余功率,直流母线电压仍会迅速上升达到阈值,导致光伏系统被切除运行.为了实现功率平衡,应减小光伏系统输出功率的大小.控制光伏系统工作在其U-I特性的左平面可以实现平稳输出[22],即减小Boost电路的占空比.光伏系统输出电流参考值为

|
(19) |
式中,IM,PM为光伏系统最大功率电池最大功率点出对应的电流电压值,PPV*为光伏电池输出功率参考值.
忽略Boost变化器的功率损耗,Boost电路的占空比可表示为
|
(20) |
式中,Idc为流过直流母线的电流值,Pin为逆变器输出有功功率值.
为避免直流母线电压波动造成控制系统的频繁切换,引入滞环控制.基于滞环控制的电压分层方式如图 11所示.

|
| 图 11 电压分层方式 Fig.11 Voltage layering method |
当Udc < U1时,光伏系统采用MPPT控制,当Udc>U2时切换为变功率控制,即光伏系统输出功率可以跟随直流母线电压变化做出调整. 图 12为变功率控制策略的控制框图.

|
| 图 12 变功率控制策略实现 Fig.12 Variable power control strategy implementation |
储能系统采用电压外环、电流内环的双环控制模式,当电网电压不对称跌时,由于负序分量的存在会导致直流侧电压出现2倍频波动,影响储能系统控制的稳定性,因此在控制环路内部加入低通滤波器滤除2倍频分量.储能系统控制策略框图如图 13所示.直流母线电压Udc与参考值作差,经PI调节器和低通滤波器后得到储能系统电流参考值,同样经PI调节后与载波信号比较得到PWM开关信号,取反即可得到两个开关管的驱动信号.

|
| 图 13 储能系统控制策略 Fig.13 Control strategy of energy storage system |
为了简化dq坐标系下基于PI控制的前馈解耦模型,并实现频率偏移条件下系统稳定控制,采用准比例谐振控制(quasi proportional resonant,QPR)器实现对交流信号的快速准确跟踪.
QPR控制器的传递函数为
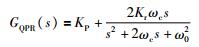
|
(21) |
式中,ω0为基波角频率,ωc为截止频率.
PR,QPR控制器的伯德图如图 14所示.由图 14可见,同PR控制器相比,QPR控制器可以在一定的频率范围内保持较大的增益,有效地抑制了电网频率偏移对控制器性能的影响.

|
| 图 14 PR,QPR控制器伯德图 Fig.14 Bode diagram of PR and QPR controller |
当电网电压中含有谐波分量时,即将电网电压作为扰动量,得到基于QPR控制的电流内环简化结构如图 15所示.
由图 15得到输出电流表达式为
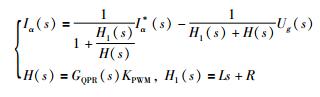
|
(22) |

|
| 图 15 电压扰动下的电流内环简化结构 Fig.15 Simplified structure of current inner loop under voltage disturbance |
式(22)可以分为两项,第一项为并网电流值参考值部分,第二项为电网电压扰动.
图 16为三种不同控制器作用下系统扰动传递函数的波特图.由如16可见PI控制器对于电网扰动信号的衰减很小,PR,QPR控制器对于扰动信号保持较大的衰减量.同时QPR控制器可以保证频率偏移时控制系统的抗扰动能力.

|
| 图 16 QPR,PR,PI控制器下的闭环扰动特性曲线 Fig.16 Closed-loop disturbance characteristic curve under QPR, PR, PI controller |
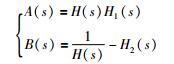
为了消除电网电压扰动对并网电流的影响,引入电网电压前馈控制,其原理等效框图如图 17所示.

|
| 图 17 电压扰动下等效控制框图 Fig.17 Equivalent control block diagram under voltage disturbance |
由图 17得到基于电压前馈控制的并网电流iα和电压扰动Ug之间的关系式为

|
(23) |
|
(24) |
由式(24)可得,只需令B(s)=0即可消除电网电压扰动对于并网电流的影响.即:
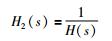
|
(25) |
结合图 17及式(23)~式(25)得到电压前馈控制策略框图如图 18所示.

|
| 图 18 电网电压前馈控制策略 Fig.18 Grid voltage feedforward control strategy |
将上述控制策略应用到光伏并网发电系统中,结合上文分析得到光伏系统低电压穿越控制策略框图如图 19所示.在故障穿越期间,要根据检测到的电压跌落深度值来调整无功功率的输出以支撑电网电压的恢复.为了保证逆变器输出不过流,输出的有功电流和无功电流的值应满足:

|
(26) |

|
| 图 19 光伏系统LVRT控制策略 Fig.19 Closed-loop disturbance characteristic curve under QPR, PR, PI controller |
当电网电压跌落时,前级光伏侧在储能系统的协调下根据直流母线电压的大小来实现控制策略的切换,后级逆变器侧选择以抑制负序电流作为控制目标,采用基于电网电压前馈的QPR双环控制策略,保证电网频率偏移时系统的动态性能.利用所提出的锁相环模块实现频率相位偏移复杂工况下电网信号的快速同步.通过计算得到控制电流的参考值,根据电压跌落深度的不同调整逆变器的无功输出以支撑电网电压恢复.实现低电压穿越期间光伏并网发电系统系统的稳定运行.
4 仿真验证在Matlab/Simulink中搭建功率等级为22 kW的光伏并网发电系统模型,仿真模型参数如表 1所示.
| 参数 | 数值 |
| L | 5 mH |
| R | 0.1 Ω |
| Cdc | 2 200 μF |
| Ug | 311 V |
| kp | 55 |
| k | 275 |
| kp2 | 0.8 |
| kp3 | 4 |
| Udc | 700 V |
| U1 | 675 V |
| U2 | 725 V |
| f | 50 Hz |
| kR | 1 800 |
| kI | 1 200 |
| kI2 | 30 |
| kI3 | 10 |
为了验证本文提出的电网信号同步方法的有效性,在Simulink中搭建仿真模型,为了模拟电网复杂工况条件,在电网电压信号中注入-5,+7,+25次谐波分量,幅值为3 V,同时A相注入5 V直流分量,电网频率偏移量为3 Hz,A相电压跌落50%.文[22]中的级联MAF-DSC-PLL和文[17]中的DSC-PLL加入对比仿真.
图 20(a)显示了故障工况下频率检测仿真结果.本文提出的级联滤波锁相环可以消除谐波以及直流分量的影响,且延时时间更短,经过0.025 s,系统进入稳态.这与图 8中显示的最小调节时间相吻合.基于级联DSC和MAF-DSC滤波的PLL由于存在着较大的延时时间,系统的动态性能受到影响.其它稳定调节时间分别为0.032 s和0.04 s.同时本文提出的PLL有着更低的频率超调,为0.8 Hz.

|
| 图 20 故障工况下的电网信号同步 Fig.20 Grid signal synchronization under unbalanced conditions |
图 20(b)显示了相位误差仿真结果.本文提出的PLL在锁相环路中增加了相位补偿环节,因此相位误差的最大超调量为1.8°,而DSC和MAF-DSC级联滤波的锁相环误差超调分别为3.6°和5°.同时本文提出的PLL的调节时间为0.025 s,同DSC和MAF-DSC级联滤波的锁相环相比,具有更快的响应速度. 图 20(c)显示了基波正序分量跟踪结果.三种PLL均能够消除谐波分量以及直流分量的影响,但频率偏移时,DSC和MAF-DSC级联滤波结构的幅值会降低,本文提出的PLL能够准确检测基波正序分量幅值为0.84 p.u,同时也可以按照基波正序分量的幅值进行无功补偿,支撑电网电压恢复.
4.2 低电压穿越仿真 4.2.1 电压对称跌落仿真故障工况设置为:0.5 s电压发生跌落,同时频率偏移量为1 Hz.其它故障设置条件同4.1小节.研究在三相对称跌落70%,以及A相单相跌落50%情况下的仿真结果. 图 21为仿真结果.

|
| 图 21 电压对称跌落仿真 Fig.21 Simulation results under balanced fault |
图 21(a)为并网点电压电流波形.如图可见,电压对称跌落以及频率偏移时,本文提出的控制策可以实现并网电流指令与电网电压的准确同步. QPR控制器可以保证频率偏移时系统的稳定,且引入电压前馈控制后并网系统抗谐波干扰的能力增强.如图 21(b)所示,并网电流波形畸变率为0.94%,满足光伏并网工程对于电流质量的要求.
图 21(c)、图 21(d)显示了故障期间逆变器输出功率以及储能系统吸收功率情况.当检测到电压跌落深度为70%时,根据图 2所示要求,逆变器有功应减小为零,同时补偿100%的无功电流.如图 21(d)所示,逆变器输出有功功率为0 kW,输出无功功率为6.6 kV·A,与图 2所示的导则要求相符.储能系统吸收由于电压跌落导致的不平衡功率,保证直流母线电压的稳定.直流母线电压与光伏系统输出功率波形如图 21(e)、图 21(f)所示. 0.52 s时,直流母线电压达到上限控制值720 V,光伏系统脱离MPPT模式,调整输出功率至17 kW. 0.81 s时,直流母线电压达到下限值675 V,光伏系统重新回到MPPT模式,保持最大输出功率22 kW运行,验证了变功率轨迹跟踪控制的正确性.
4.2.1 电压不对称跌落仿真不对称故障下的仿真结果如图 22所示.

|
| 图 22 电压不对称跌落仿真 Fig.22 Simulation results under unbalanced fault |
从图 22(a)、图 22(b)可以看出,二倍频负序分量完全被抑制,并网点电流畸变率为1.09%,满足并网要求.故障期间逆变器输出功率以及储能系统吸收功率情况如图 22(c)、图 22(d)所示.由于选择以抑制并网电流的负序分量为主要的目的,因此逆变器输出的有功和无功功率会出现二倍频波动.在储能系统的电流环控制中由于增加了滤波环节,因此输出功率无波动,保障了储能系统的使用寿命. 图 22(e)、图 22(f)为直流母线电压与光伏系统输出功率的仿真结果.电网不对称故障导致的有功功率二倍频分量会导致直流母线电压的波动,通过储能系统的调节,基本可使波动量降低在允许范围内.由于电压跌落深度为0.84 p.u,通过储能系统的调节可以使冗余功率全部被消耗,即光伏系统继续保持最大功率输出,由图 22(f)可以看出,此时光伏系统输出最大功率21 kW,与前文的分析相符.
5 结论本文提出了两级式储能并网逆变器在电网混合故障工况下的综合控制策略.在αβ坐标系下采用基于QPR控制器的双闭环控制,实现了频率偏移条件下控制系统的稳定.同时电网电压前馈控制有效地抑制了谐波分量对于并网电流的影响.选择以抑制负序分量作为电网不对称故障下的控制目标,保证故障期间并网电流的质量.本文提出的级联滤波锁相环结构可以在0.025 s的调节时间内实现频率偏移,电压畸变等复杂工况条件下电网信号的同步,保证并网点电压电流同频同相,同时实现准确的跟踪电网电压基波正序分量的幅值,即电压跌落深度,并根据并网导则的要求,按照不同跌落深度补偿不同的无功功率以支撑电网电压恢复,保证故障穿越期间光伏并网发电系统的稳定运行.仿真实验证明了本文提出理论的有效性.
| [1] |
周京华, 刘劲东, 陈亚爱, 等.
大功率光伏逆变器的低电压穿越控制[J]. 电网技术, 2013, 37(7): 1799–1807.
Zhou J H, Liu J D, Chen Y A, et al. Low voltage ride through control of high power photovoltaic inverters[J]. Power System Technology, 2013, 37(7): 1799–1807. |
| [2] | Mirhosseini M, Pou J, Agelidis V G. Singleand two-stage inverter-based grid-connected photovoltaic power plants with ride-through capability under grid faults[J]. IEEE Transactions on Sustainable Energy, 2015, 6(3): 1150–1159. |
| [3] |
马聪, 高峰, 李瑞生, 等.
新能源并网发电系统低电压穿越与孤岛同步检测的无功功率扰动算法[J]. 电网技术, 2016, 40(5): 1406–1414.
Ma C, Gao F, Li R S, et al. Reactive power disturbance algorithm for low voltage ride through and island synchronization detection in new energy grid-connected power generation system[J]. Power System Technology, 2016, 40(5): 1406–1414. |
| [4] |
张兴, 曹仁贤.
太阳能光伏并网发电及其逆变控制[M]. 北京: 机械工业出版社, 2010: 374-375.
Zhang X, Cao R X. Solar photovoltaic grid-connected power generation and its inverter control[M]. Beijing: Mechanical Industry Press, 2010: 374-375. |
| [5] |
涂春鸣, 郭祺, 姜飞, 等.
适用微网故障穿越的多功能并网变换器研究[J]. 电网技术, 2017, 41(6): 1980–1988.
Tu C M, Guo Q, Jiang F, et al. Research on multi function grid-connected converter for micro-grid fault crossing[J]. Power System Technology, 2017, 41(6): 1980–1988. |
| [6] |
张明光, 陈晓婧.
光伏并网发电系统的低电压穿越控制策略[J]. 电力系统保护与控制, 2014, 42(11): 28–33.
Zhang M G, Chen X J. Low voltage ride through control strategy for photovoltaic grid-connected power generation system[J]. Power System Protection and Control, 2014, 42(11): 28–33. |
| [7] |
叶吉亮, 李岚, 刘海霞, 等.
三相LCL并网逆变器改进型准比例谐振控制技术[J]. 计算机仿真, 2018, 35(9): 116–120.
Ye J L, Li L, Liu H X., et al. Improved quasi-proportional resonance control technology for three-phase LCL grid-connected inverter[J]. Computer Simulation, 2018, 35(9): 116–120. |
| [8] |
郭勇, 李勇.
两级式光伏发电系统低电压穿越控制策略研究[J]. 电力工程技术, 2017, 36(6): 7–13.
Guo Y, Li Y. Research on low voltage ride through control strategy of two-level photovoltaic power generation system[J]. Electric Power Engineering Technology, 2017, 36(6): 7–13. |
| [9] | Neves F, Carrasco M, Mancilla-David F, et al. Unbalanced grid fault ride-through control for single-stage photovoltaic inverters[J]. IEEE Transactions on Power Electronics, 2015, 31(4): 3338–3347. |
| [10] |
雷金勇, 葛俊, 谈赢杰, 等.
三相四桥臂逆变器不对称故障穿越限流控制及电网电压支撑改进策略[J]. 电网技术, 2019, 44(3): 944–952.
Lei J Y, Ge J, Tan Y J, et al. Asymmetric fault crossing current limiting control and grid voltage support improvement strategy for three-phase four-bridge arm inverter[J]. Power Grid Technology, 2019, 44(3): 944–952. |
| [11] |
叶海峰, 陈存林, 李顺.
模型预测控制实现逆变器电压穿越研究[J]. 控制工程, 2018, 25(5): 795–798.
Ye H F, Chen C L, Li S. Research on inverter voltage ride through model predictive control[J]. Control Engineering, 2018, 25(5): 795–798. |
| [12] |
马临超, 蒋炜华, 薛宝星.
NPC型三电平永磁同步风力发电并网逆变器模型预测控制满足低电压穿越要求研究[J]. 电力系统保护与控制, 2017, 45(16): 151–156.
Ma L C, Jiang W H, Xue B X. Research on NPC-type three-level permanent magnet synchronous wind power grid-connected inverter model predictive control to meet low voltage ride-through requirements[J]. Power System Protection and Control, 2017, 45(16): 151–156. |
| [13] |
汤旻安, 高晓红.
不平衡电网电压条件下光储微电网并网控制[J]. 高电压技术, 2018, 45(6): 1879–1888.
Tang Y A, Gao X H. Grid-connected control of optical storage microgrid under unbalanced grid voltage conditions[J]. High Voltage Technology, 2018, 45(6): 1879–1888. |
| [14] | Reza M S, Sadeque F, Hossain M M, et al. Three-phase PLL for grid-connected power converters under both amplitude and phase unbalanced conditions[J]. IEEE Transactions on Industrial Electronics, 2019: 1–1. |
| [15] | Freijedo F, Yepes A, López Ó, et al. Three-phase PLLs with fast postfault retracking and steady-state rejection of voltage unbalance and harmonics by means of lead compensation[J]. IEEE Transactions on Industry Applications, 2011, 26(1): 85–95. |
| [16] | Golestan S, Guerrero J M. Conventional synchronous reference frame phase-locked loop is an adaptive complex filter[J]. IEEE Transactions on Industrial Electronics, 2015, 62(3): 1679–1682. |
| [17] | Gude S, Chu C C. Three-phase PLLs by using frequency adaptive multiple delayed signal cancellation pre-filters under adverse grid conditions[J]. IEEE Transactions on Industry Applications, 2018, 54(4): 3832–3844. |
| [18] |
陈东明, 陈明亮, 谢桢, 等.
基于改进滤波及正负序分离法的锁相环[J]. 电网技术, 2016, 40(3): 931–937.
Chen D M, Chen M L, Xie Z, et al. Phase-locked loop based on improved filtering and positive and negative sequence separation method[J]. Power System Technology, 2016, 40(3): 931–937. |
| [19] |
王安娜, 唐爱博, 刘宇凝, 等.
基于级联滤波锁相环的电网信号同步方法[J]. 东北大学学报(自然科学版), 2020, 41(4): 457–463.
Wang A N, Tang A B, Liu Y N, et al. Grid signal synchronization method by using cascaded filter phase-locked loop[J]. Journal of Northeastern University (Natural Science), 2020, 41(4): 457–463. |
| [20] |
刘鑫蕊, 高超, 王智良.
基于非线性扰动观测器的光伏并网逆变器直流侧母线电压控制[J]. 电网技术, 2019, 44(3): 897–906.
Liu X R , Gao C, Wang Z L. DC side bus voltage control of photovoltaic grid-connected inverter based on nonlinear disturbance observer[J]. Power Grid Technology, 2019, 44(3): 897–906. |
| [21] | Golestan S, Freijedo F D, Vidal A, et al. A Quasi-type-1 phase-locked loop structure[J]. IEEE Transactions on Power Electronics, 2014, 29(12): 6264–6270. |
| [22] | Huang Q, Kaushik R. An improved delayed signal cancellation PLL for fast grid synchronization under distorted and unbalanced grid condition[J]. IEEE Transactions on Industry Applications, 2017, 53(5): 4985–4997. |